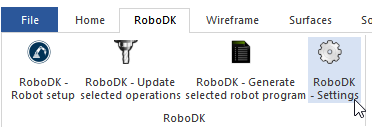
Barra de ferramentas
Ao abrir o software Mastercam, você deverá ver uma guia da barra de ferramentas RoboDK. Selecione essa guia RoboDK para ver as opções disponíveis para configurar o projeto de usinagem com robô no RoboDK.
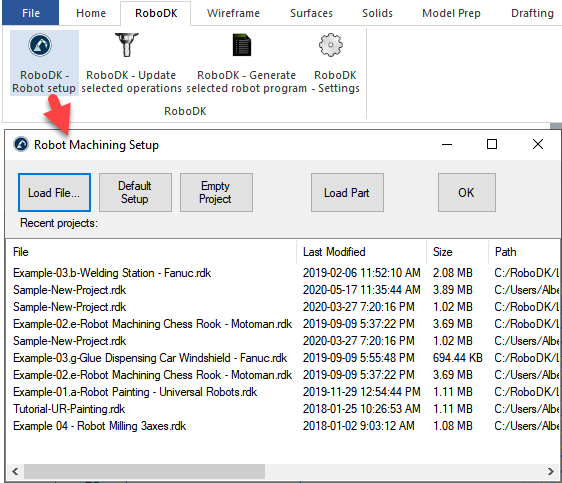
Configuração do robô
O botão Robot setup (Configuração do robô)
●Load File... (Carregar arquivo...): Selecione um arquivo para abri-lo com o RoboDK e usá-lo como o projeto padrão para o seu projeto Mastercam.
●Default Setup (Configuração padrão): Configure a nova estação com um robô, fuso e frame de referência padrão. A peça também será exportada automaticamente para o RoboDK.
●Empty Project (Projeto vazio): Abra o RoboDK com uma nova estação vazia para permitir que o usuário construa uma nova configuração. Mais informações sobre como configurar um novo projeto do zero estão disponíveis na seção Introdução.
●Load Part (Carregar peça): Carregue a peça do Mastercam para o RoboDK (a peça será salva como um arquivo STL e carregada automaticamente). Todos os sólidos e superfícies visíveis serão carregados.
Visite a seção de usinagem com robôs para obter mais informações sobre a construção de uma nova configuração.
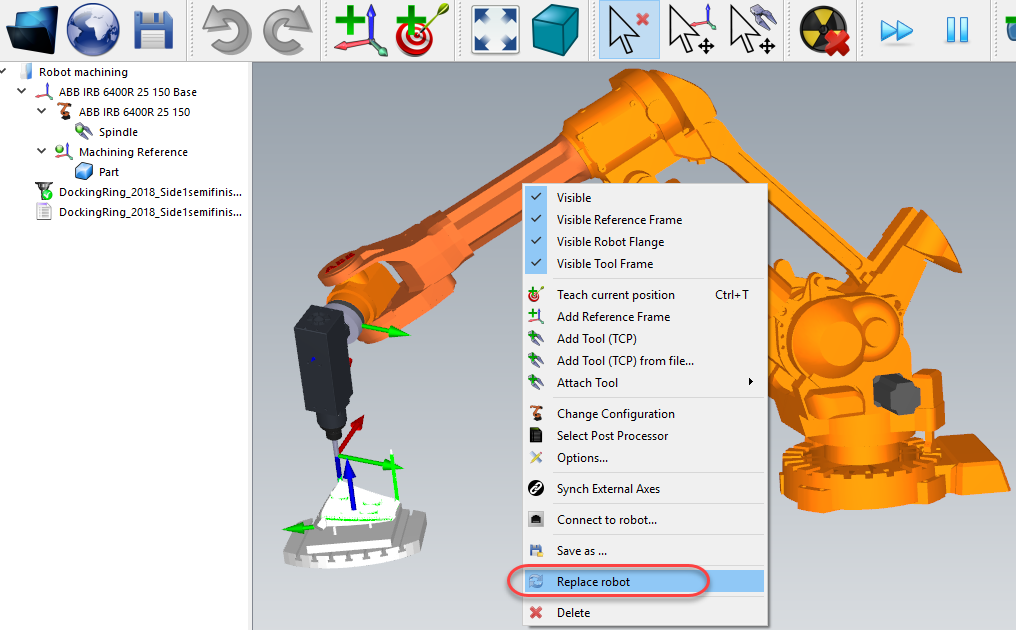
Você pode alterar facilmente o robô, modificar a ferramenta e/ou o frame de referência. Por exemplo, siga estas etapas para alterar o robô:
1.Clique com o botão direito do mouse no robô
2.Selecione Substituir robô (como mostrado na imagem)
3.Selecione o novo robô
O instalador do RoboDK fornece apenas alguns robôs por padrão; no entanto, é possível fazer o download de mais robôs da biblioteca on-line.
Mais informações sobre como adicionar uma ferramenta robótica estão disponíveis na seção Introdução.
Mantenha Alt+Shift pressionados para mover uma ferramenta do robô (TCP). Isso é útil para definir a pose do robô antes de ensinar um alvo.
Salve o projeto para manter as alterações selecionando Arquivo➔ Salvar Estação (Ctrl+S).
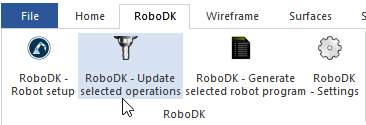
Atualizar a(s) operação(ões) selecionada(s)
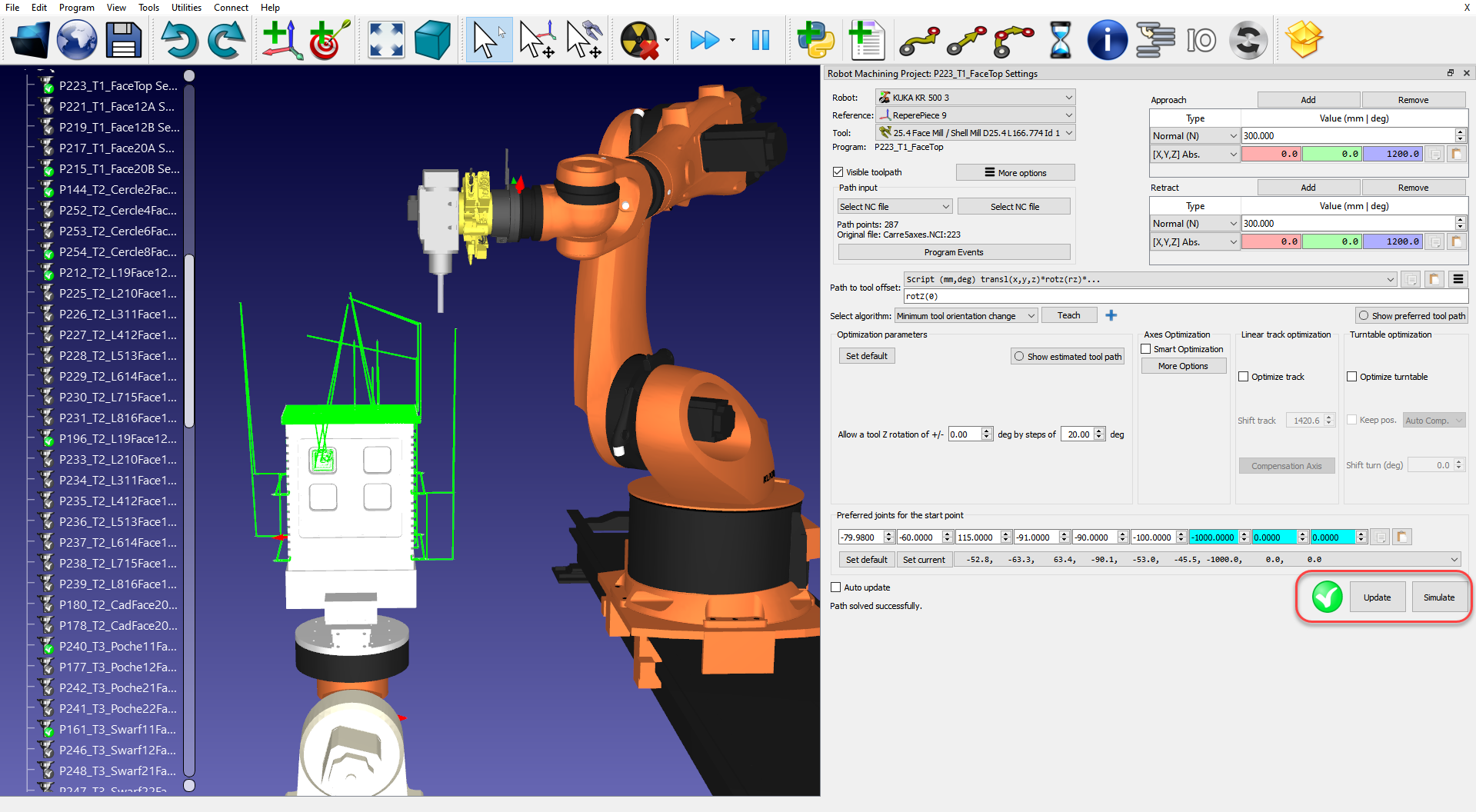
Selecione Update selected operations (Atualizar operações selecionadas) para gerar o caminho da ferramenta para as operações selecionadas e simulá-las no RoboDK.
Essa ação carregará os percursos de ferramenta selecionados no RoboDK para a usinagem com robô. Por padrão, cada operação de usinagem será dividida como um programa de robô separado.
Uma marca de seleção verde será exibida se o programa for viável com o robô selecionado. Se houver algum problema (como singularidades, limites de eixo ou problemas de alcance), será exibida uma marca vermelha com uma mensagem sobre o problema.
Clique duas vezes no projeto de usinagem com robô
Clique com o botão direito do mouse em um programa e selecione Executar para simulá-lo (ou clique duas vezes no programa). Você também pode selecionar Gerar programa do robô (F6) para obter o programa do robô que precisa ser carregado no controlador do robô. Mais informações sobre como gerar programas de robô estão disponíveis na seção Programação off-line.
Se necessário, clique com o botão direito do mouse em um programa e selecione Selecione Pós-processador para alterar o pós-processador. Essa etapa pode ajudá-lo a personalizar a aparência do código gerado. Mais informações sobre como selecionar e personalizar pós-processadores estão disponíveis na seção de pós-processadores.
Por exemplo, quando você usa um robô KUKA, o RoboDK gera automaticamente o pós-processador para robôs KRC2 (chamado KUKA KRC2); no entanto, se você tiver um KRC4, poderá escolher o pós-processador KUKA KRC4.
Gerar programas de robô a partir do Mastercam
Você pode gerar programas de robô diretamente do Mastercam quando a estação RoboDK estiver pronta. Para isso, selecione Generate selected robot program (Gerar programa de robô selecionado)
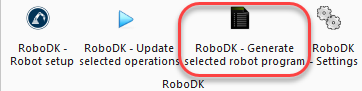
O RoboDK não será exibido a menos que haja problemas com o programa. Essa opção pode ser usada mesmo que o RoboDK não esteja sendo executado; nesse caso, o RoboDK será executado em segundo plano.
Siga estas etapas no RoboDK para visualizar ou modificar a localização dos programas de seu robô:
1.Selecione Ferramentas - Opções
2.Selecione a guia Programa
3.Selecione Definir na pasta de programas do Robô
Configurações do plug-in
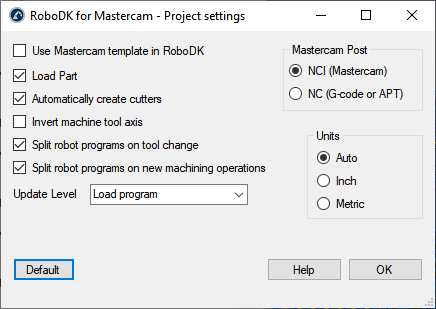
Selecione RoboDK Settings (Configurações do RoboDK)
Entre outras coisas, você pode modificar as seguintes opções:
1.Use o modelo da Mastercam em vez do modelo do RoboDK (a navegação 3D e os modelos de cores no RoboDK corresponderão ao estilo da Mastercam). No RoboDK, certifique-se de desmarcar a opção Ignorar mudança de configurações a partir de aplicativos de terceiros no menu Ferramentas ➔ Opções ➔ Outras para permitir esse modelo no RoboDK.
2.Carregue e atualize a peça no RoboDK toda vez que você lançar uma nova operação de usinagem. Somente os sólidos e as superfícies visíveis serão carregados.
3.Criar automaticamente ferramentas de corte. Nesse caso, novas ferramentas serão criadas automaticamente em relação à primeira ferramenta do robô (porta-ferramentas) e o TCP será deslocado pelo comprimento total da ferramenta em relação ao porta-ferramentas.
4.Marcar a opção Inverter eixo da máquina-ferramenta permite que o eixo Z da ferramenta aponte automaticamente para o lado interno da ferramenta (em vez de apontar para o lado externo).
5.Use arquivos NC (como APT ou G-code) em vez de arquivos NCI. O RoboDK pode ler os seguintes arquivos para gerar simulações e programas de robôs:
a.Arquivos NCI (opção padrão): Carrega o caminho de ferramenta nativo da Mastercam no RoboDK. Esse é o método preferido para a maioria das operações.
b.Arquivos NC (arquivos de código G). Permite que você carregue ciclos de perfuração prontos (longhand) usando a definição de máquina do RoboDK.