Configuração do robô
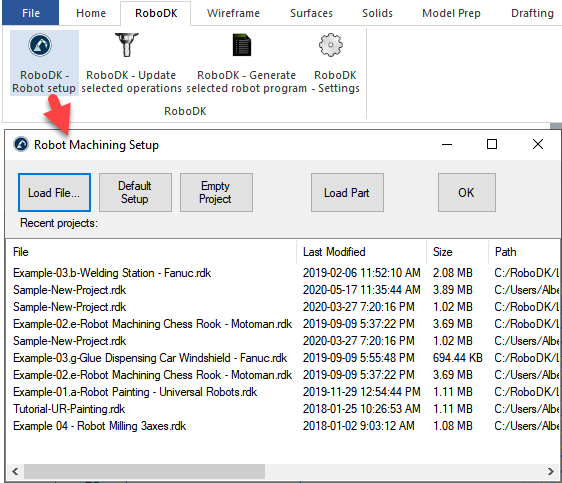
O botão Robot setup (Configuração do robô)
●Load File... (Carregar arquivo...): Selecione um arquivo para abri-lo com o RoboDK e usá-lo como o projeto padrão para o seu projeto Mastercam.
●Default Setup (Configuração padrão): Configure a nova estação com um robô, fuso e frame de referência padrão. A peça também será exportada automaticamente para o RoboDK.
●Empty Project (Projeto vazio): Abra o RoboDK com uma nova estação vazia para permitir que o usuário construa uma nova configuração. Mais informações sobre como configurar um novo projeto do zero estão disponíveis na seção Introdução.
●Load Part (Carregar peça): Carregue a peça do Mastercam para o RoboDK (a peça será salva como um arquivo STL e carregada automaticamente). Todos os sólidos e superfícies visíveis serão carregados.
Visite a seção de usinagem com robôs para obter mais informações sobre a construção de uma nova configuração.
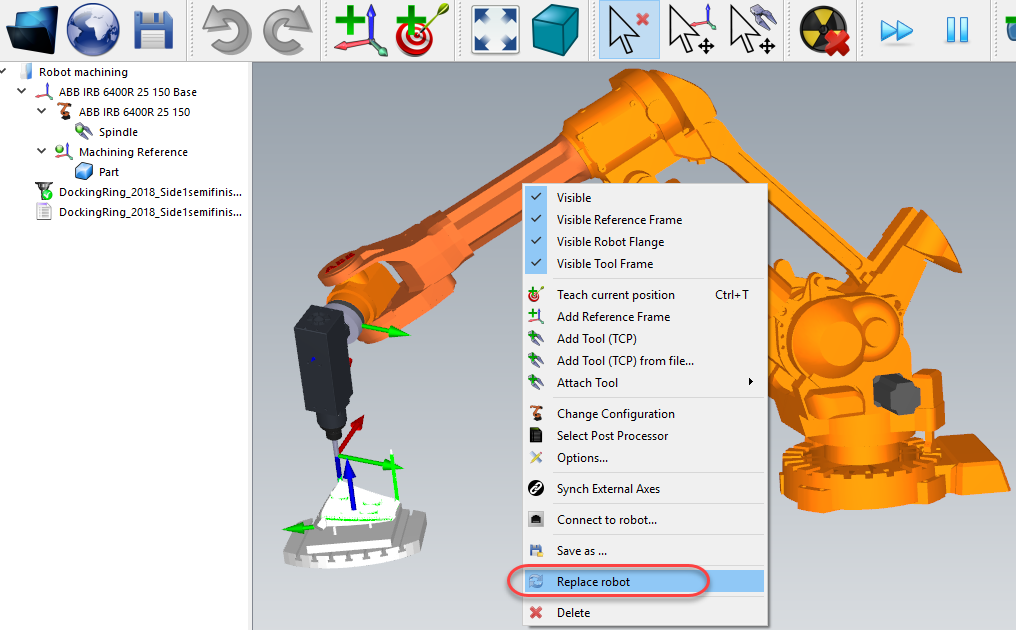
Você pode alterar facilmente o robô, modificar a ferramenta e/ou o frame de referência. Por exemplo, siga estas etapas para alterar o robô:
1.Clique com o botão direito do mouse no robô
2.Selecione Substituir robô (como mostrado na imagem)
3.Selecione o novo robô
O instalador do RoboDK fornece apenas alguns robôs por padrão; no entanto, é possível fazer o download de mais robôs da biblioteca on-line.
Mais informações sobre como adicionar uma ferramenta robótica estão disponíveis na seção Introdução.
Mantenha Alt+Shift pressionados para mover uma ferramenta do robô (TCP). Isso é útil para definir a pose do robô antes de ensinar um alvo.
Salve o projeto para manter as alterações selecionando Arquivo➔ Salvar Estação (Ctrl+S).