Instalação manual
Estas são as etapas manuais para configurar o plug-in do RoboDK para o Mastercam. Você deve seguir essas etapas se o plug-in do RoboDK para o Mastercam não tiver sido instalado automaticamente por padrão usando o instalador do RoboDK:
1.Instale ou atualize o RoboDK: https://robodk.com/download.
2.Você deve encontrar os arquivos necessários para instalar o plug-in do RoboDK para o Mastercam na pasta: C:/RoboDK/Other/Plugin-Mastercam/.
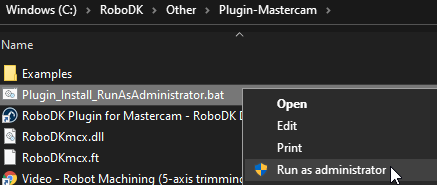
3.Clique com o botão direito do mouse no arquivo Plugin_Install_RunAsAdministrator.bat e selecione Executar como administrador.
Se esse processo falhar, você deve seguir estas etapas e copiar os arquivos necessários manualmente:
1.Copie os arquivos RoboDKmcx.dll e RoboDKmcx.ft para a pasta Mastercam chooks (C:\Program Files\Mcam2020\chooks\)

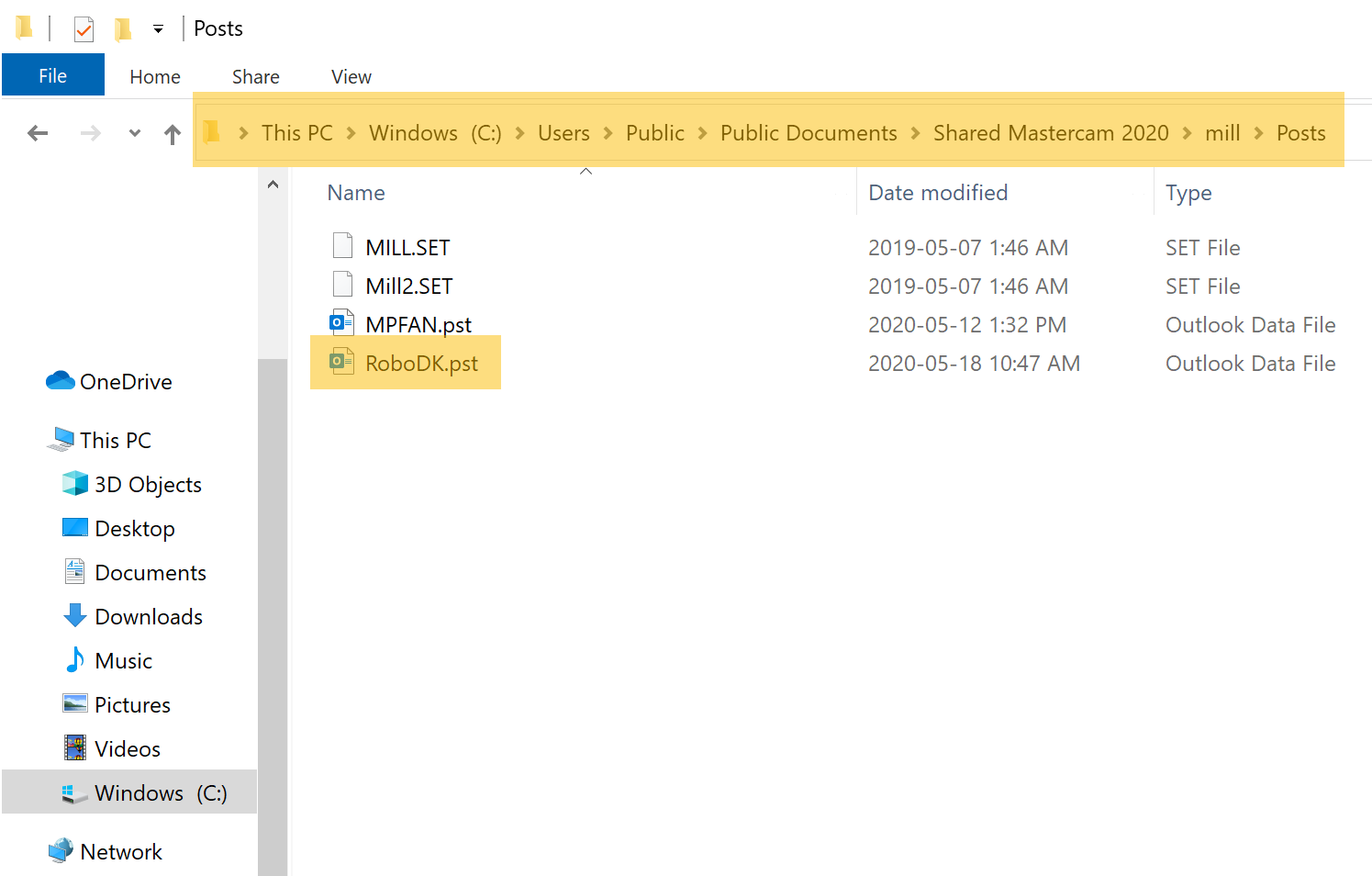
2.Copie o arquivo RoboDK.pst na pasta: C:\Usuários\Público\Documentos\Compartilhado Mastercam 2020\mill\Posts\.
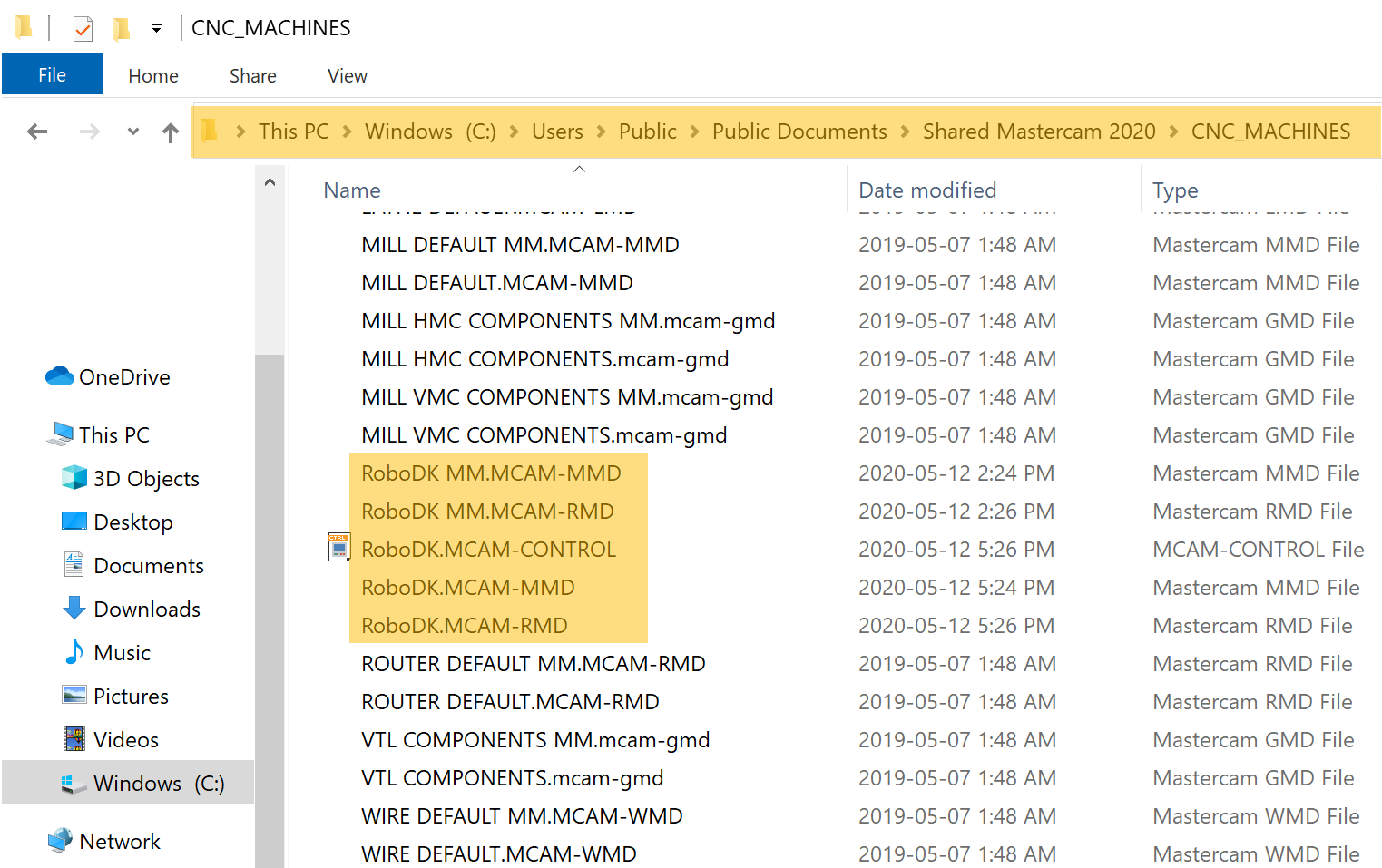
3.Copie os seguintes arquivos de definição de máquina na pasta C:\Users\Public\Documents\Shared Mastercam 2020\CNC_MACHINES\:
a.RoboDK.MCAM-MMD
b.RoboDK MM.MCAM-MMD
c.RoboDK.MCAM-RMD
d.RoboDK MM.MCAM-RMD
e.RoboDK MM.CONTROL
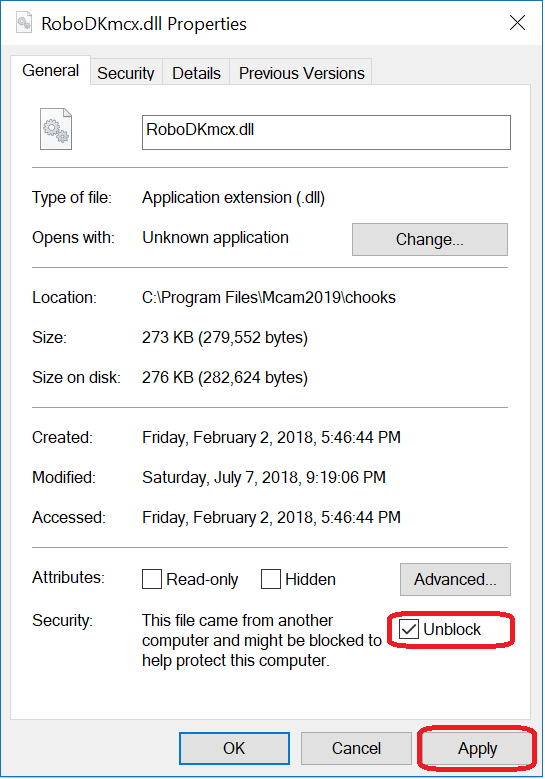
Se você tiver problemas com o processo de instalação, talvez seja necessário clicar com o botão direito do mouse no arquivo RoboDKmcx.dll, selecionar Propriedades, marcar Desbloquear e selecionar Aplicar, conforme mostrado na imagem a seguir. Não é necessário seguir esta etapa se você não vir a opção Desbloquear.