Usinagem com robôs de 3 eixos
Este exemplo mostra como criar um projeto de usinagem de robô de 3 eixos usando o plug-in Mastercam.
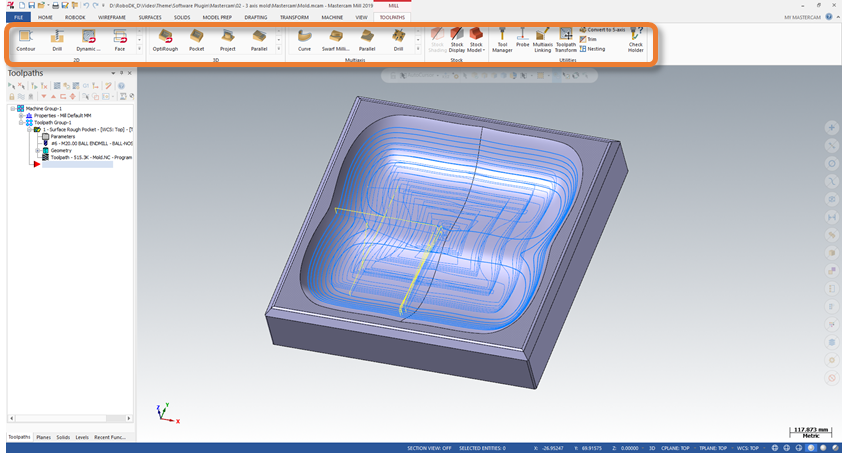
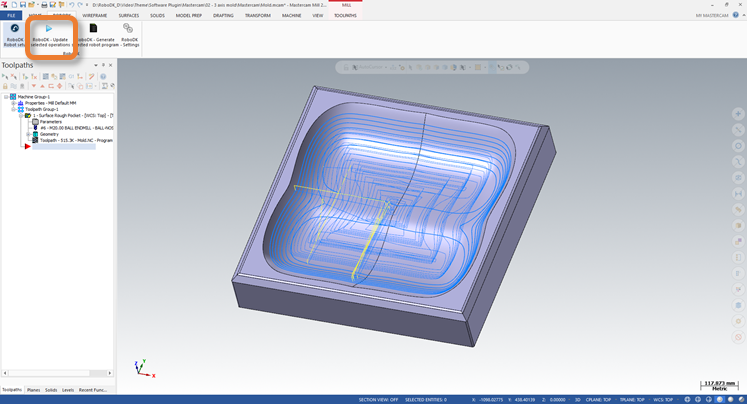
1.Carregue a peça no Mastercam.
2.Crie o caminho da ferramenta usando as ferramentas da fresadora Mastercam.
3.Crie uma estação no RoboDK com seu robô, seu fuso e quaisquer outros objetos necessários.

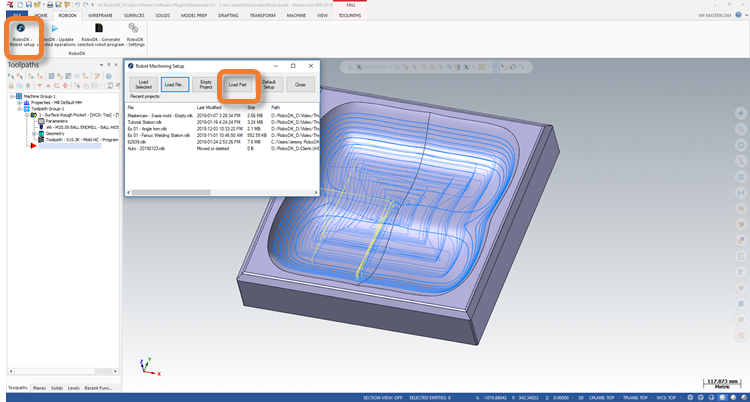
4.Na guia do plug-in do RoboDK, selecione RoboDK➔ Robot setup.
5.Na janela Robot machine setup (Configuração de usinagem com robô), selecione Load Part (Carregar peça).
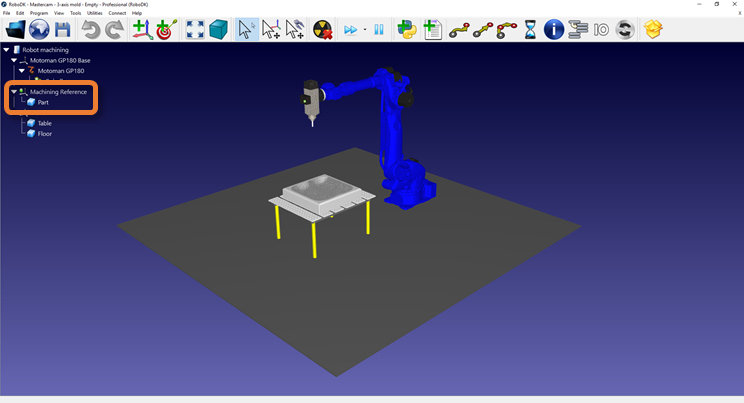
6.No RoboDK, ajuste a posição do frame de referência da Referência de Usinagem, se necessário. Mantenha a tecla Alt pressionada e mova a referência com suas setas usando o cursor para reposicionar a peça na frente do robô.
7.Na guia Plugin do RoboDK, selecione RoboDK ➔ Update selected operations (Atualizar operações selecionadas).
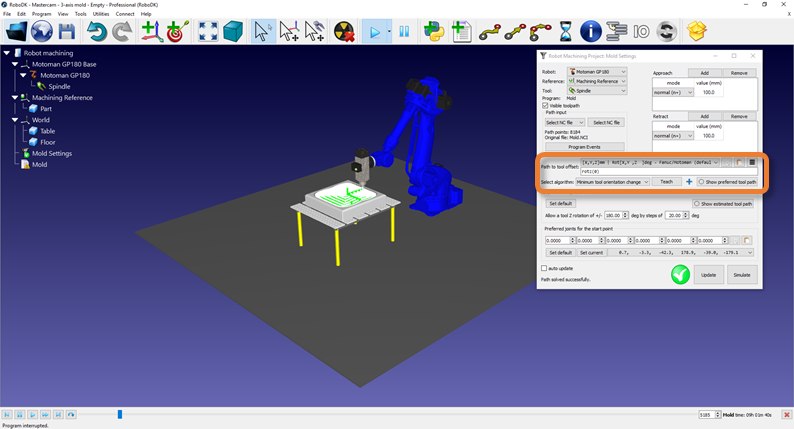
8.No RoboDK, selecione Atualizar e simular na janela Projeto de usinagem com robô.
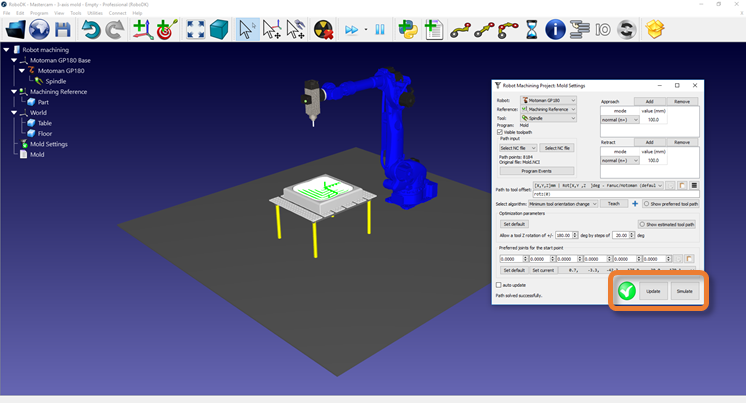
9.Modifique a orientação da ferramenta ao longo do caminho, se necessário. Mantenha pressionada a tecla Alt e oriente a ferramenta em torno das setas do eixo Z usando o cursor. Selecione o botão Marcar para definir a pose desejada para o caminho. Selecione Atualizar para recalcular o caminho usando essa nova pose. Selecione Simular para simular o caminho modificado.