RoboDK Plugin for MecSoft
Introdução
O Add-in do RoboDK para os softwares Mecsoft permite que você configure rapidamente projetos de usinagem com robôs diretamente do RhinoCAM e do Visual CAD/CAM. Com a integração do RoboDK para os softwares CAD/CAM da MecSoft, você pode combinar facilmente o software de usinagem RhinoCAM ou Visual CAD/CAM com o RoboDK para simular e programar robôs industriais para a usinagem.
Mais informações sobre o RoboDK para usinagem com robôs estão disponíveis na Seção de Usinagem com robôs.
Este documento descreve como configurar o plug-in do RoboDK para os softwares Mecsoft e como usar o RhinoCAM e o Visual CAD/CAM para configurar projetos de usinagem com robôs no RoboDK.
RhinoCAM Setup
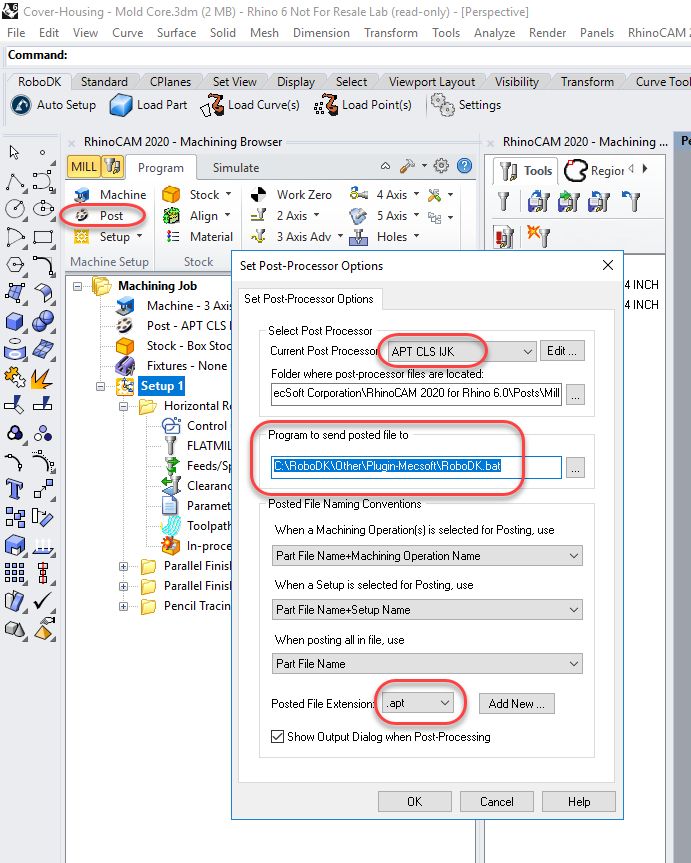
Siga estas etapas para configurar automaticamente o projeto de usinagem com robô a partir do RhinoCAM:
1.Selecione a guia Program (Programa) no Navegador de Usinagem do RhinoCAM.
2.Selecionar postagem
3.Defina o Post Processor como APT CLS IJK
4.Defina o programa para o qual enviar o arquivo postado:
C:\RoboDK\Other\Plugin-MecSoft\RoboDK.bat
5.Selecione OK
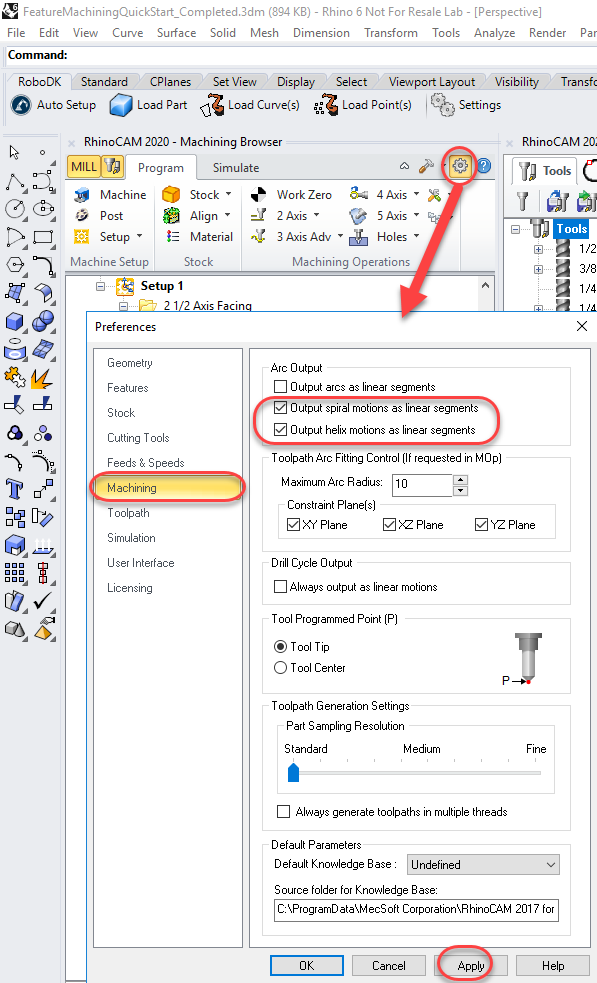
Você também deve gerar hélices e espirais como movimentos lineares (não como um comando Helix). Os comandos Helix não são compatíveis com os robôs industriais. Você deve seguir estas etapas para alterar essa configuração:
1.Selecione o botão CAM Preferences (Preferências do CAM) (conforme mostrado na imagem a seguir).
2.Selecione a guia Machining (Usinagem)
3.Marque Output spiral motions as linear segments (Movimentos espirais de saída como segmentos lineares).
4.Marque Output helix motions as linear segments (Movimentos da hélice de saída como segmentos lineares).
Fluxo de trabalho
Esta seção descreve o comportamento padrão do RoboDK quando você envia uma trajetória de ferramenta de usinagem para o RoboDK (conforme descrito na seção anterior).
O envio de um programa de usinagem para o RoboDK cria automaticamente um novo projeto usando uma célula padrão pronta para a usinagem com robô. A célula inclui um robô, uma ferramenta e um sistema de coordenadas/dado que representa a referência de usinagem com robô.
Se você já tiver uma estação RoboDK aberta, ela usará o projeto RoboDK existente sem substituir o robô, a ferramenta ou o sistema de coordenadas.
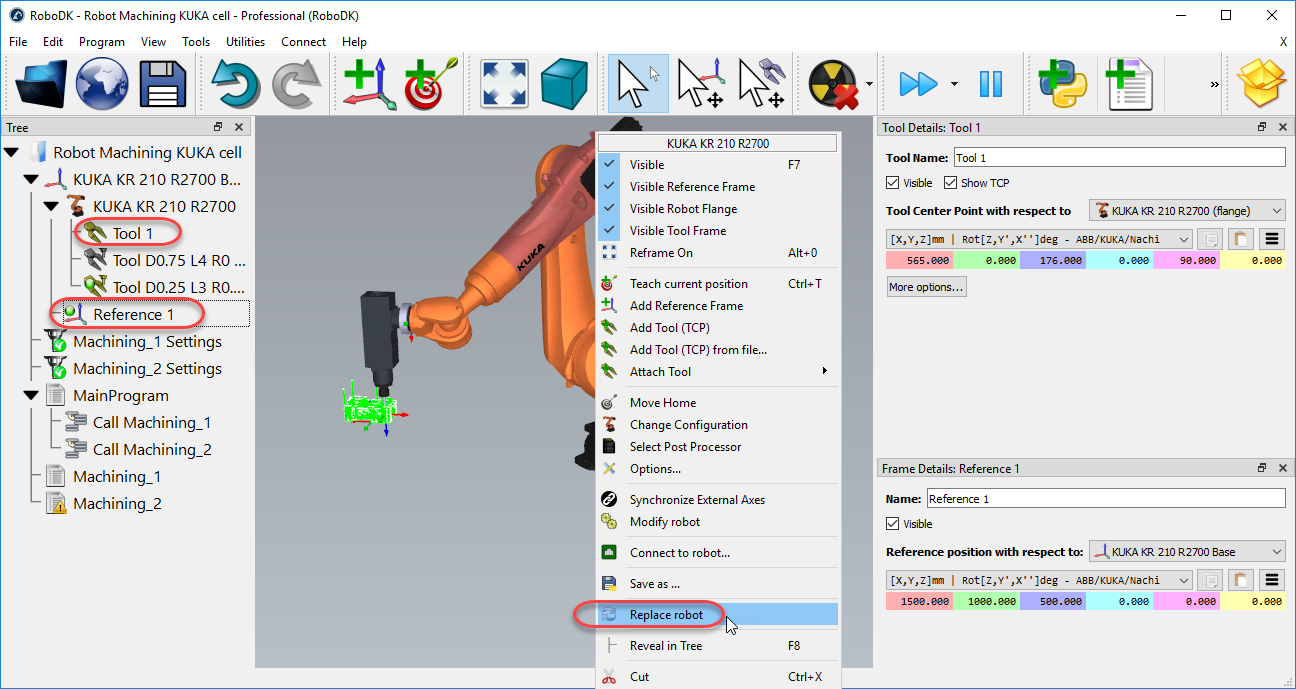
Você pode alterar facilmente o robô, modificar a ferramenta e/ou o quadro de referência. Por exemplo, siga estas etapas para alterar o robô:
1.Clique com o botão direito do mouse no robô
2.Selecione Substituir robô (conforme mostrado na imagem a seguir)
3.Selecione o robô que você gostaria de usar
O instalador do RoboDK fornece apenas alguns robôs por padrão; no entanto, é possível fazer o download de mais robôs da biblioteca on-line.
Mais informações sobre como adicionar uma ferramenta de robô estão disponíveis na seção Introdução.
Salve o projeto para manter as alterações selecionando Arquivo ➔ Salvar Estação (Ctrl+S).
Simular a usinagem com robôs
Depois de atualizar a célula do robô, selecione Utilitários ➔ Atualizar Projeto de Usinagem com Robôs (Ctrl+U) para atualizar todos os programas. Uma marca de seleção verde será exibida se os programas forem viáveis com os parâmetros atuais da célula. Se houver algum problema (como singularidades, limites de eixo ou problemas de alcance), será exibida uma marca vermelha.
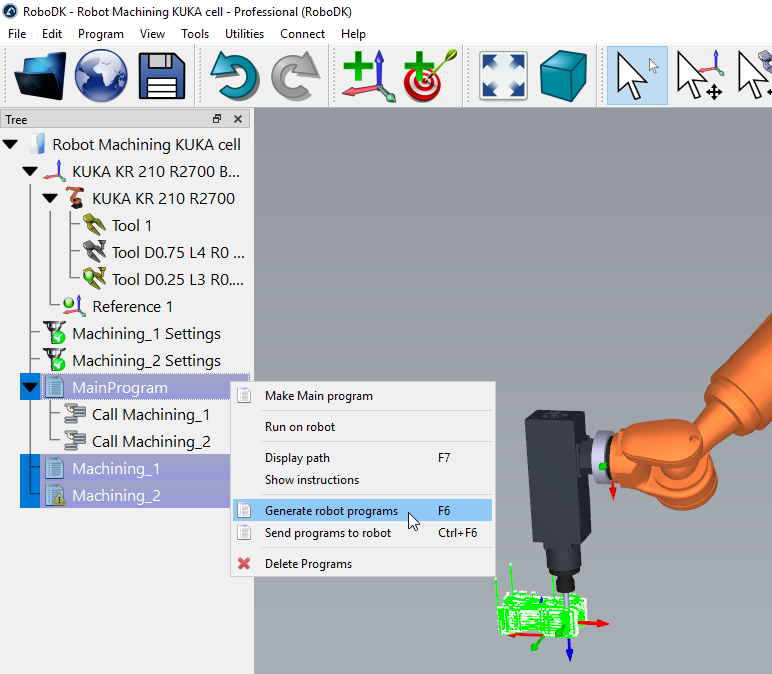
Clique duas vezes no projeto de usinagem com robô
Clique com o botão direito do mouse em um programa e selecione Executar para simulá-lo (ou clique duas vezes no programa). Você também pode selecionar Gerar programa do robô (F6) para gerar o programa para o controlador do robô. Mais informações sobre como gerar programas de robô estão disponíveis na seção Programação off-line.
Você também pode clicar com o botão direito do mouse em um programa e clicar em Selecionar Pós-processador para alterar o pós-processador. Mais informações sobre pós-processadores estão disponíveis na seção de pós-processadores.
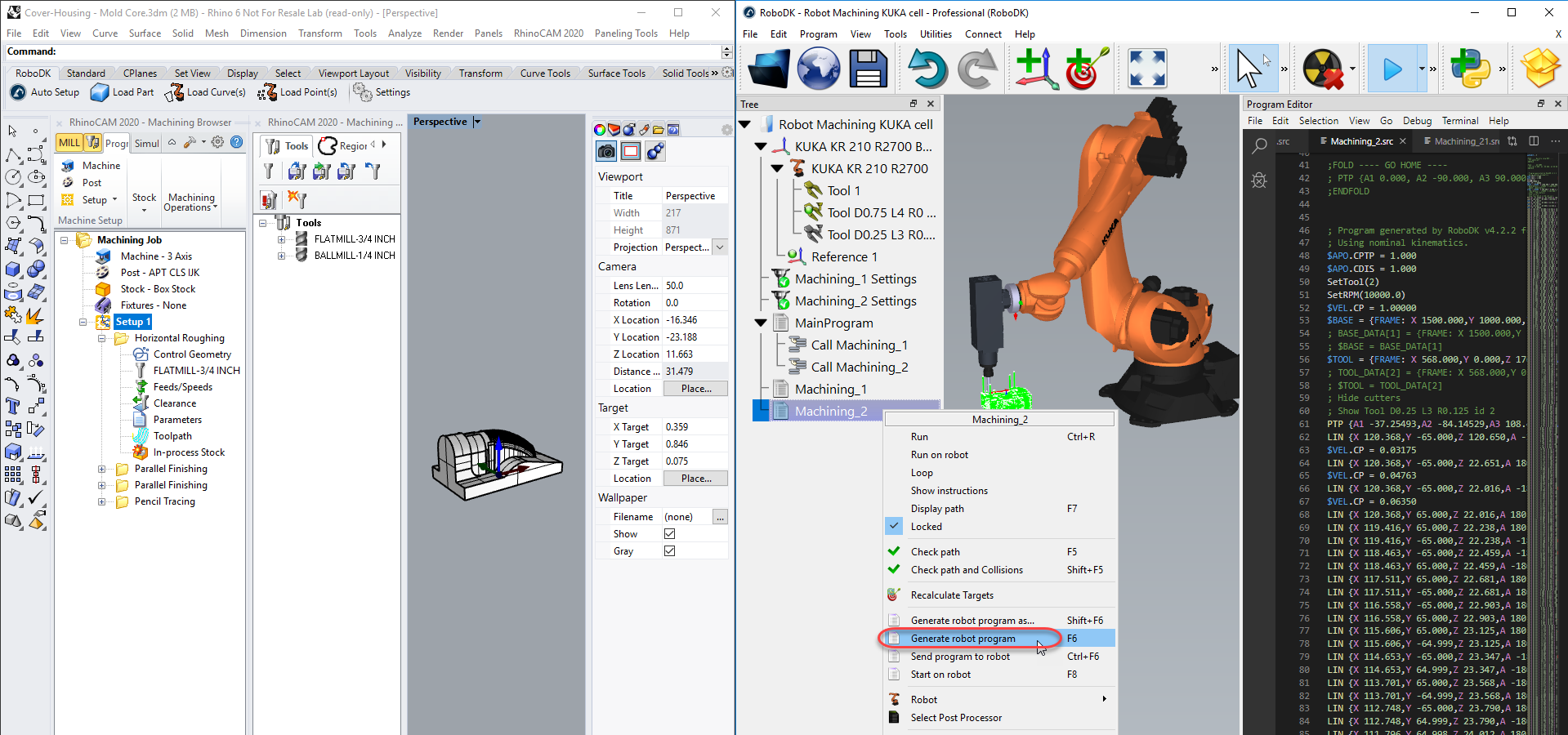
Gerar programas de robôs
Clique com o botão direito do mouse em um programa no RoboDK e selecione Gerar Programa de Robô (F6) para gerar os programas para a usinagem com robô.
Siga estas etapas no RoboDK para alterar o local dos programas salvos do robô:
1.Selecione Ferramentas - Opções
2.Selecionar Programa
3.Selecione Definir ao lado da pasta de programas do Robô
Exemplos de RhinoCAM
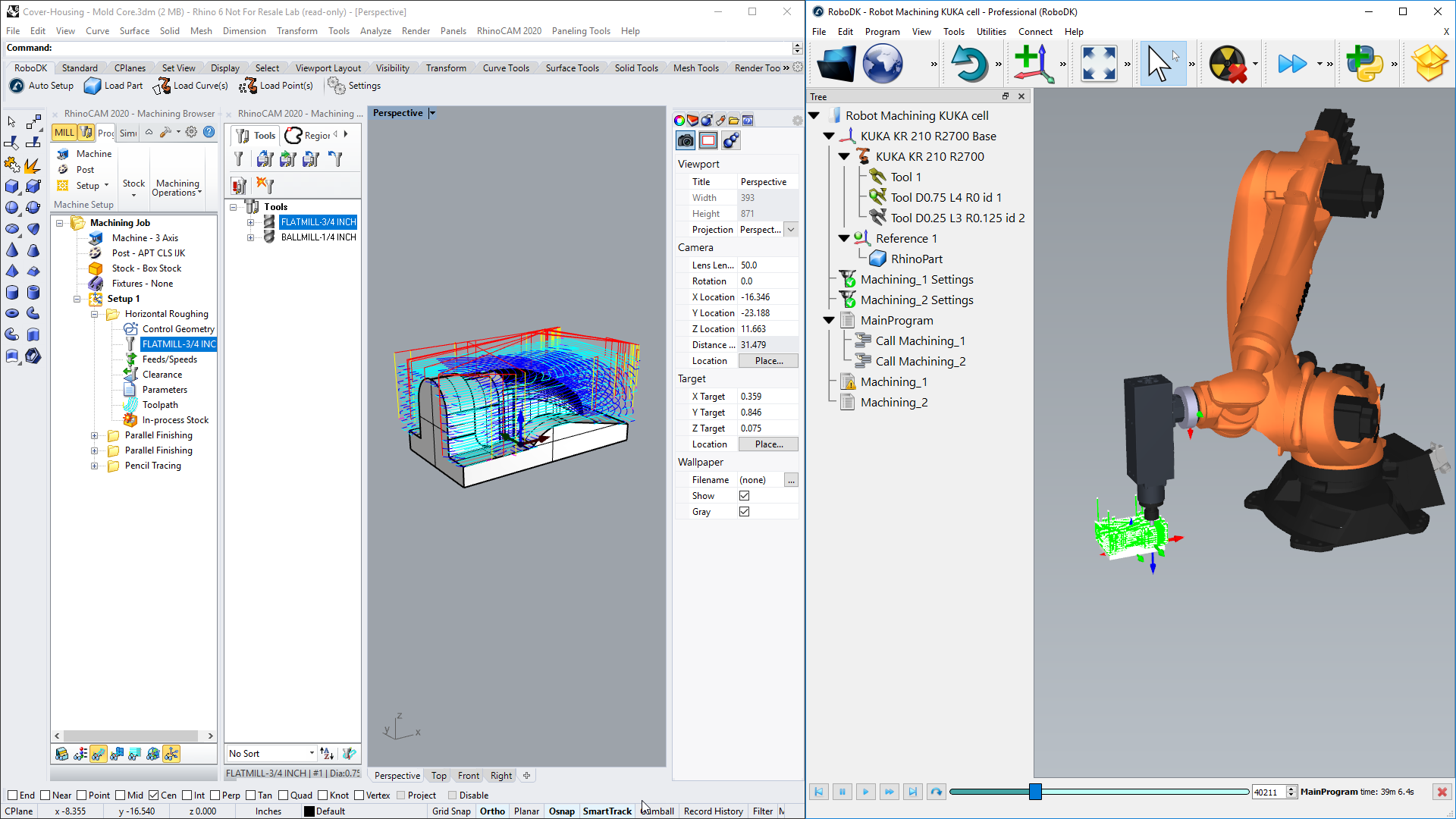
Usinagem com robôs de 3 eixos com RhinoCAM
Este exemplo mostra como criar um projeto de usinagem com robô de 3 eixos usando o RhinoCAM e o RoboDK.
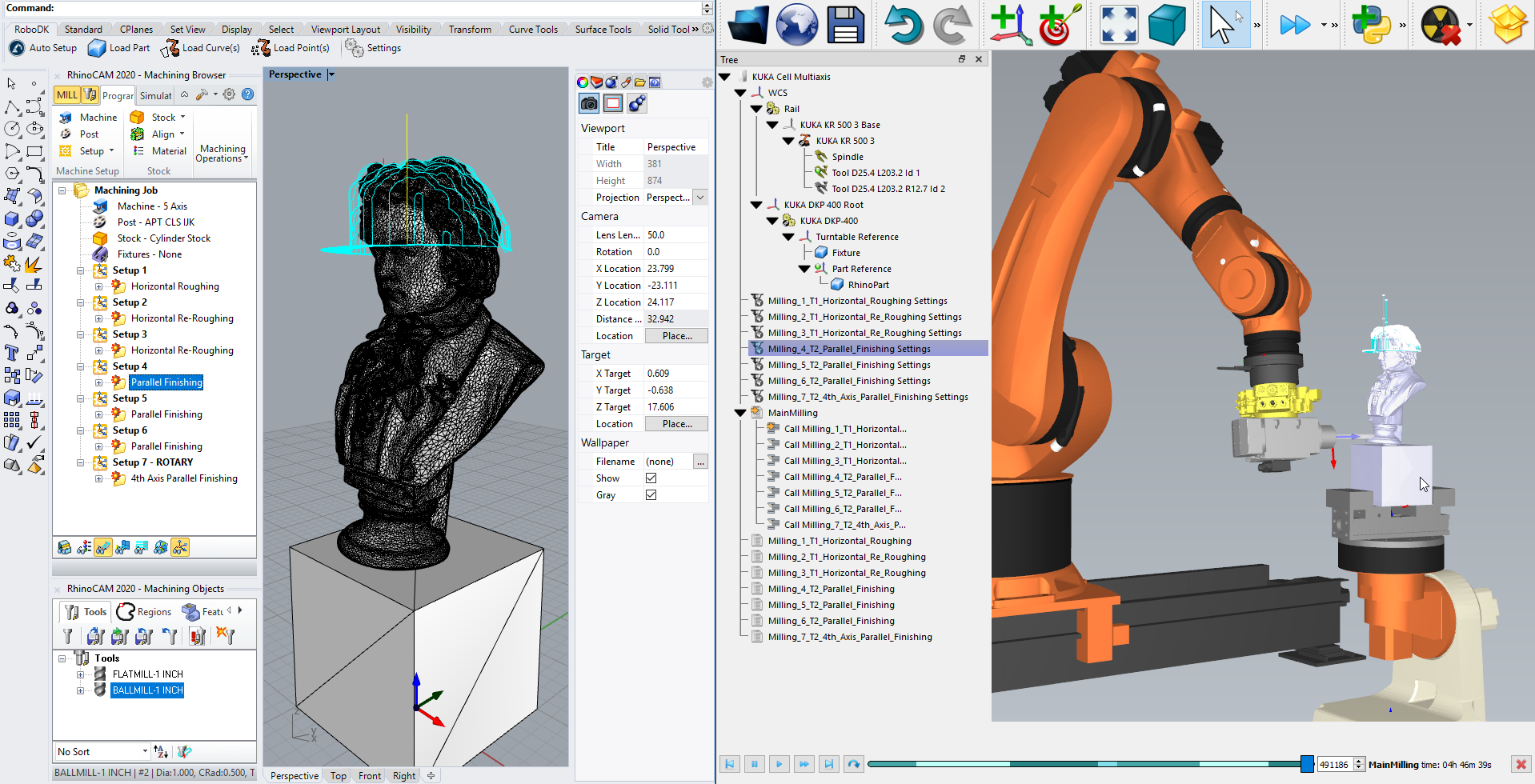
Usinagem com robôs de 5 eixos com RhinoCAM
Este exemplo mostra como criar um projeto de usinagem com robô de 5 eixos para escultura usando o RhinoCAM e o RoboDK. Esse projeto usa um robô KUKA sincronizado com um trilho linear e uma mesa giratória de dois eixos (9 eixos sincronizados).