Configurações
Cada componente do Grasshopper contém configurações específicas que você pode personalizar. Você também pode alterar as configurações padrão que se aplicam aos comandos do RoboDK (ou botões da barra de ferramentas) selecionando o botão Settings.
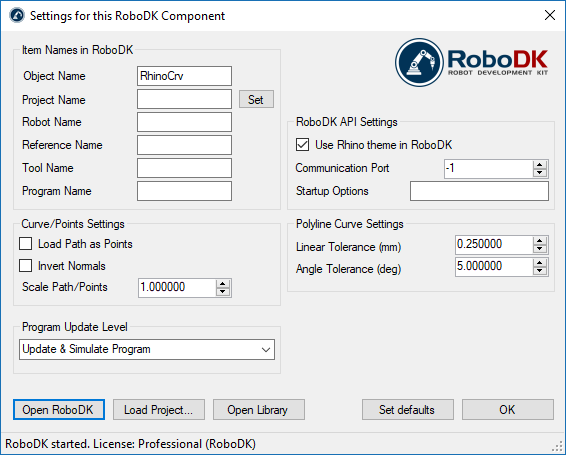
●Object Name (Nome do Objeto) - Defina o nome do objeto de curva/pontos que será carregado no RoboDK. O objeto no RoboDK é sobrescrito toda vez que o caminho é recalculado. Esse valor é ignorado se o nome do objeto for fornecido como uma entrada de componente (O).
●Project Name (Nome do Projeto) - Defina o nome/caminho do projeto/estação do RoboDK (arquivo .RDK) a ser usado. Se o arquivo já estiver carregado, ele usará o projeto existente. Se o projeto aberto no RoboDK não corresponder ao nome do arquivo, ele abrirá o projeto se o caminho completo for especificado.
●Robot Name (Nome do robô) - Defina o nome do objeto robô que será carregado no RoboDK. O nome do robô deve corresponder ao nome visível na árvore de estações do RoboDK. Deixe esse valor em branco (padrão) para usar o primeiro robô disponível.
●Reference Name (Nome de referência) - Defina o nome do frame de referência para posicionar o caminho em relação ao robô. O nome deve corresponder ao nome visível na árvore de estações do RoboDK.
●Tool Name (Nome da ferramenta) - Defina o nome da ferramenta (TCP) a ser usada com o robô para seguir o caminho.
O nome deve corresponder ao nome visível na árvore de estações do RoboDK.
●Program Name (Nome do programa) - Defina o nome ou o caminho do programa a ser gerado.
●Load Path as Points (Carregar caminho como pontos) - Marque essa opção para criar o objeto como pontos e um projeto de seguimento de pontos no RoboDK. Isso é útil para operações de fabricação, como perfuração. Desmarque essa opção para carregar o caminho como um projeto de seguimento de curva.
●Invert Normals (Inverter normais) - Marque essa opção para inverter as normais de superfície calculadas. Isso inverterá a orientação da ferramenta do robô.
●Use Rhino Theme in RoboDK (Use o tema Rhino no RoboDK) - Inicie o RoboDK com o tema Rhino. Isso inclui a alteração do comportamento do mouse para a navegação 3D e a cor do plano de fundo. Essas configurações se aplicam apenas quando o RoboDK é iniciado com o Rhino. Essas configurações podem ser alteradas no menu Ferramentas - Opções do RoboDK.
●Communication Port (Porta de comunicação) - Defina a porta de comunicação para se comunicar com o RoboDK. Várias instâncias do RoboDK podem estar sendo executadas ao mesmo tempo e usar configurações diferentes se uma porta diferente for usada. Quando esse valor é definido como -1 (padrão), a porta padrão é usada (20500).
●Startup Options (Opções de Inicialização) - Defina os argumentos a serem passados para o RoboDK na primeira vez que ele for iniciado. Por exemplo, para iniciar o RoboDK silenciosamente, você pode definir '/NOSPLASH /NOSHOW /HIDDEN'. Os programas ainda podem ser gerados mesmo que o RoboDK não seja exibido. Para obter mais informações, consulte a seção Linha de Comando da API do RoboDK.
●Linear Tolerance (mm) - Define a precisão linear para dividir as curvas como um conjunto de pontos.
●Angle Tolerance (mm) - Define a precisão angular para dividir as curvas como um conjunto de pontos.
Botões:
●Open RoboDK (Abrir o RoboDK) - Abrir um projeto no RoboDK... Uma nova janela será aberta com opções adicionais.
●Load Project ... (Carregar Projeto ...) - Carregue o projeto do RoboDK (arquivo RDK) com o qual você deseja usar este componente.");
●Open Library (Abrir Biblioteca) - Biblioteca on-line aberta do RoboDK.
●Set defaults (Definir padrões) - Define as configurações padrão do componente.
●OK - Aplicar essas configurações e fechar essa janela. Se você não selecionar OK, as configurações alteradas não serão aplicadas.