Cúpula com Listras
Este exemplo mostra como carregar uma estação RoboDK de amostra (configuração padrão) e seguir um conjunto de curvas definidas no Rhino com o robô.
1.Carregue o exemplo do Dome no Rhino.
2.Selecione a guia RoboDK e selecione
3.Selecione Load Project...
4.Selecione Default Setup (Configuração padrão). O RoboDK iniciará e carregará um projeto de amostra com um robô KUKA, uma ferramenta (um fuso como Ferramenta 1) e um frame de referência (Referência 1).
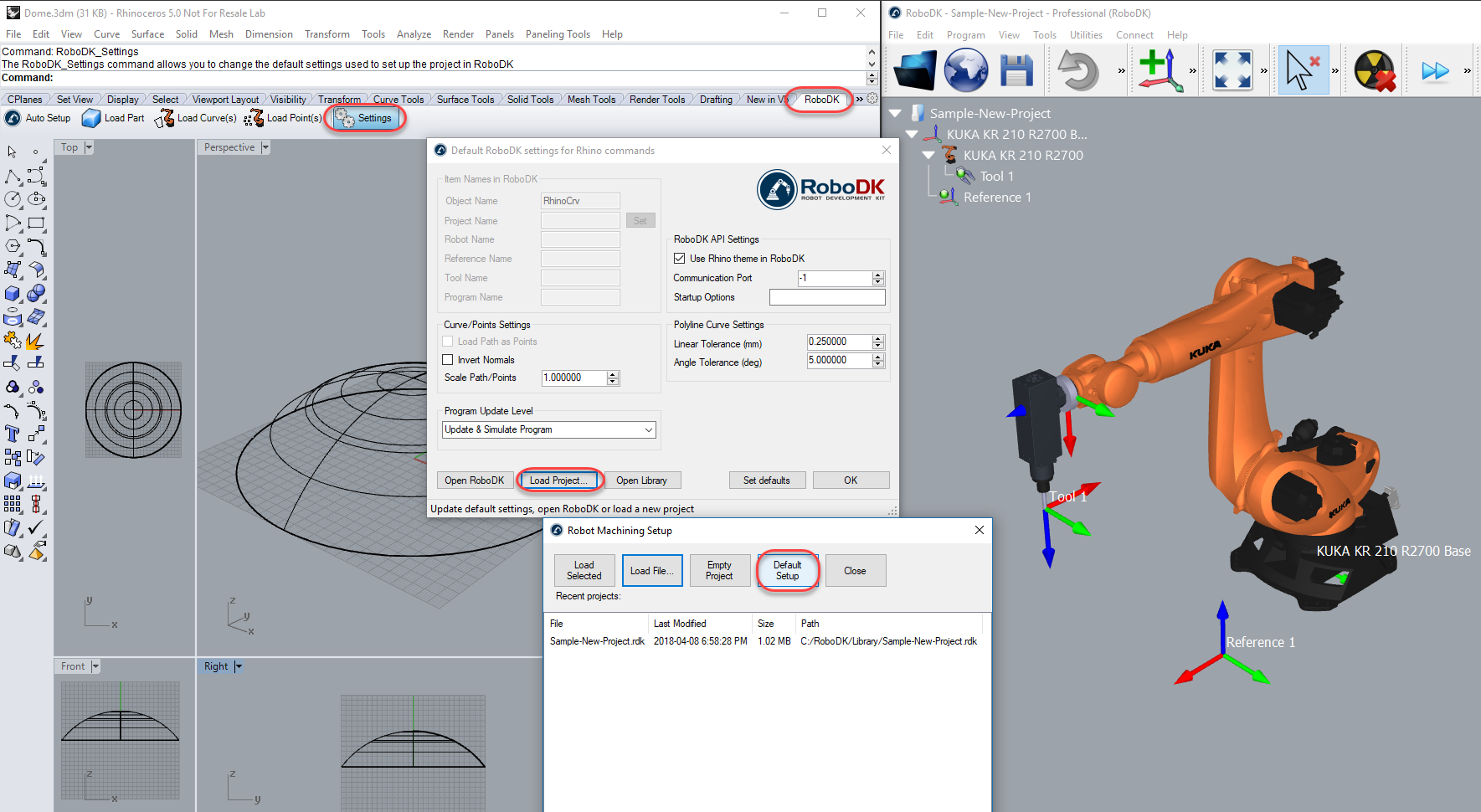
5.Feche a janela Configurações ou selecione OK.
6.Selecione o botão
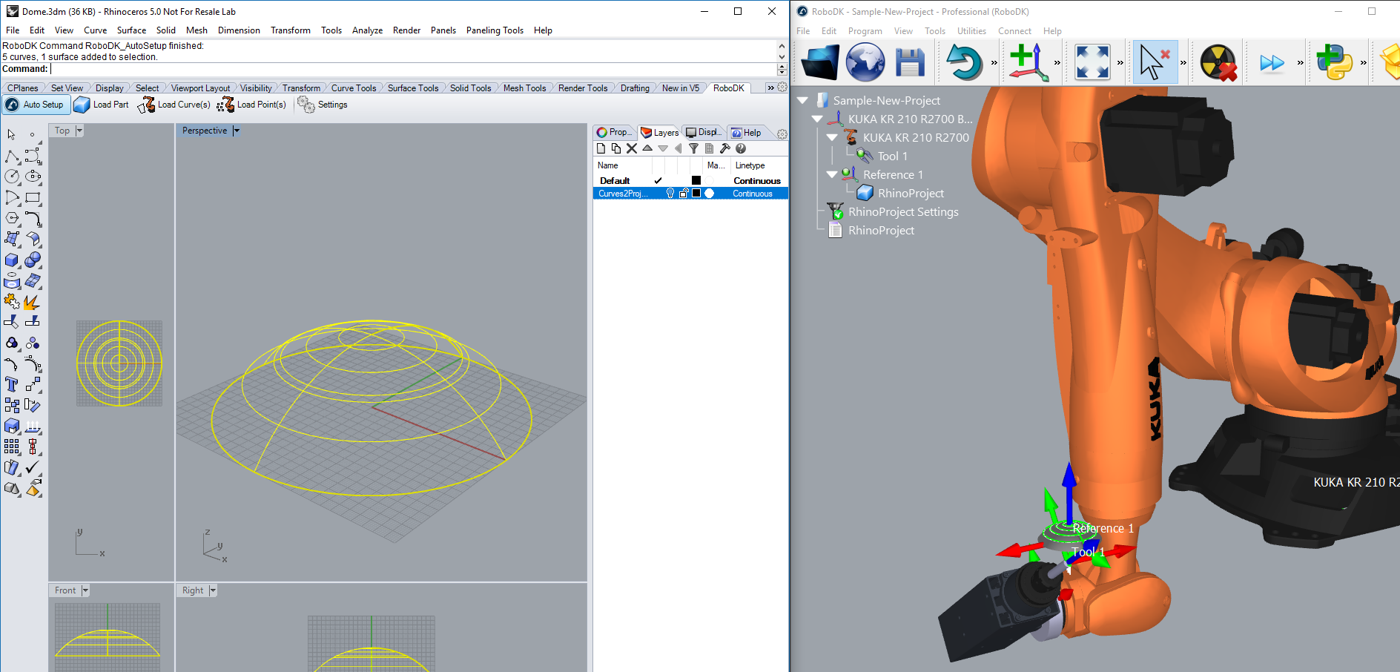
7.Selecione todas as curvas e superfícies e pressione Enter (ou clique com o botão direito do mouse). O projeto será carregado no RoboDK, conforme mostrado na imagem a seguir.
Você deverá ver a peça carregada no frame de referência ativo (Referência 1) e um novo projeto Curve follow no RoboDK que segue as curvas com a ferramenta ativa do robô (Ferramenta 1).
Você também pode ver que as normais da superfície foram extraídas na direção oposta. Siga estas etapas para resolver esse problema:
8.Selecione
9.Marque a opção Invert Normals (Inverter normais).
10.Selecione OK.
11.Repita as etapas 6 e 7.
Agora você deve ver as normais da superfície invertidas e o movimento de aproximação vem da parte superior da peça. O robô deve ser capaz de se mover ao longo do caminho da ferramenta sem nenhum problema.
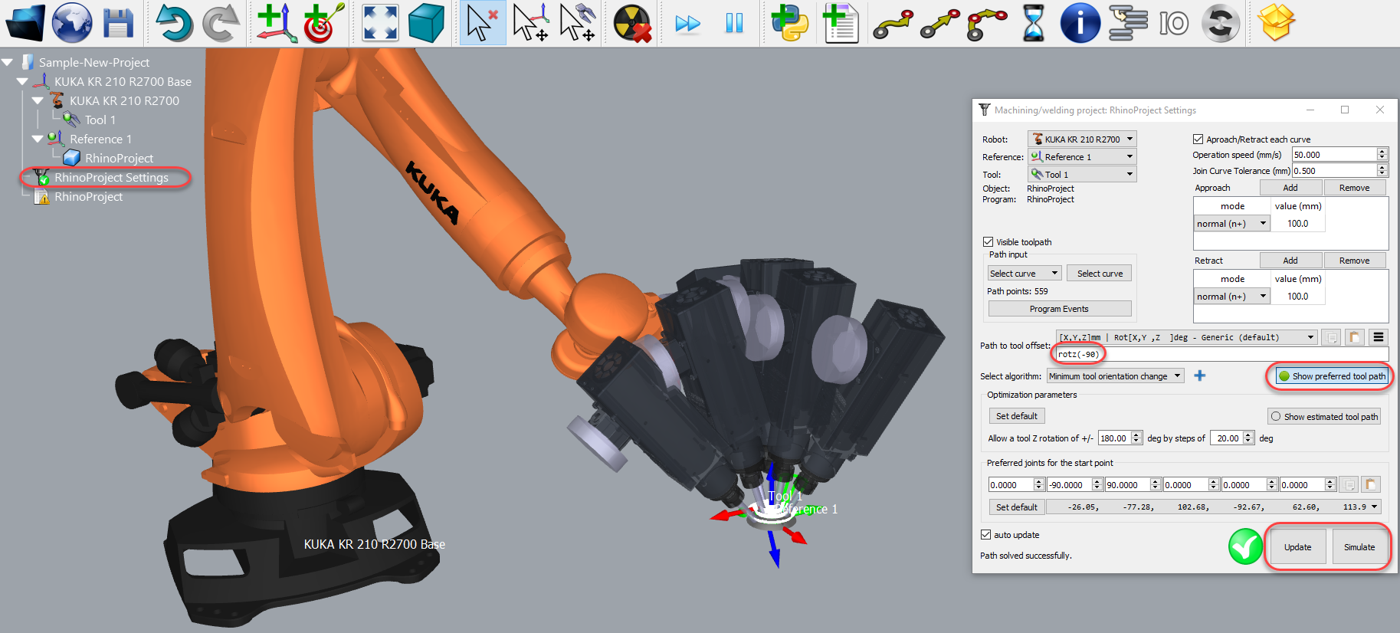
Clique duas vezes em
Por exemplo, você pode selecionar Exibir trajetória de ferramenta preferida para ver e modificar a orientação padrão da ferramenta em relação à peça. Altere o valor Offset de trajetória para ferramenta para definir uma rotação adicional. Para isso, você pode inserir um novo valor ou simplesmente usar a roda do mouse para ver uma visualização rápida do resultado.
Mais informações sobre como alterar essas configurações estão disponíveis na seção de usinagem com robô.
Por fim, quando a simulação produzir o resultado desejado, você poderá gerar o programa ou exportar a simulação:
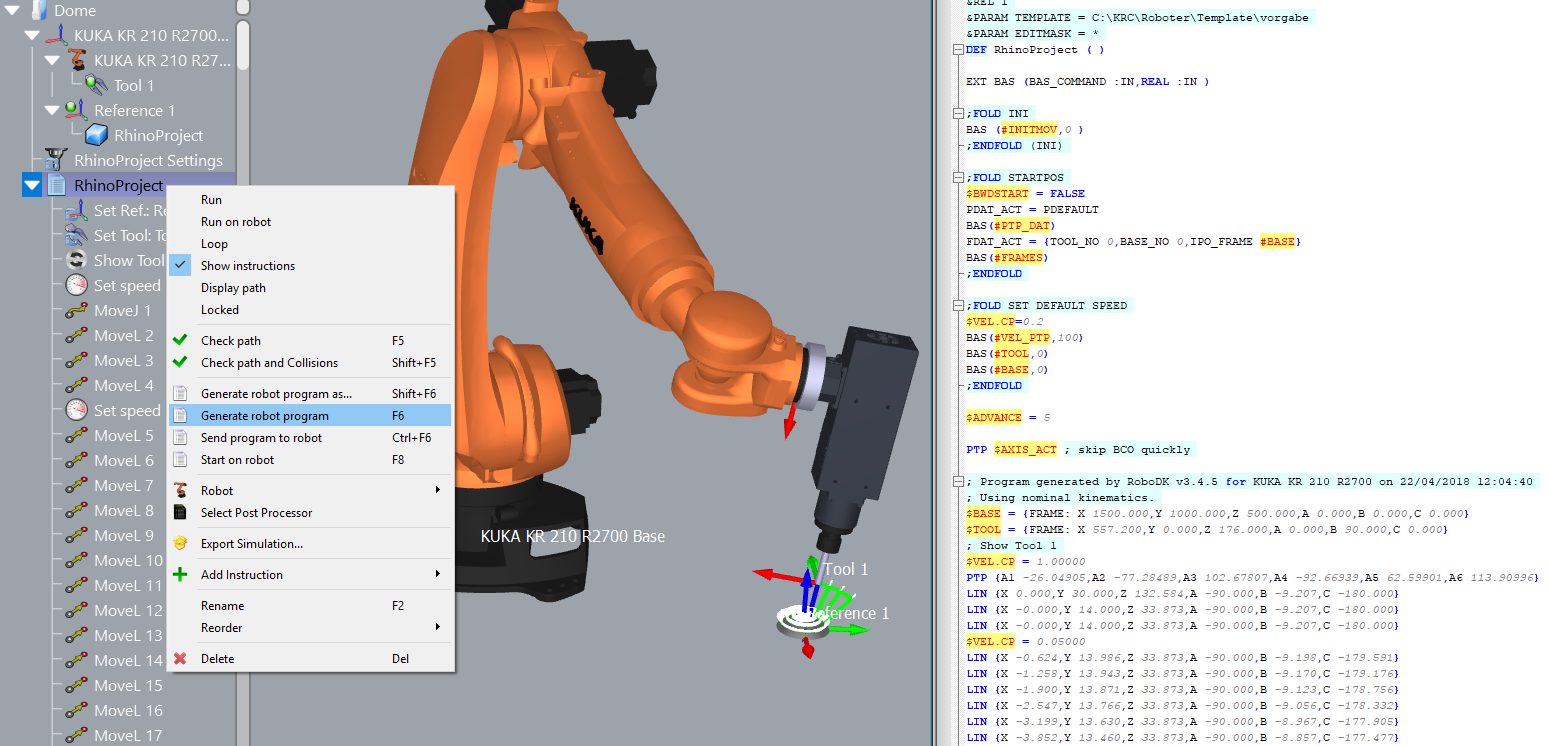
12.Clique com o botão direito do mouse no programa RhinoProject
13.Selecione Gerar programa do robô (F6). O programa do robô será gerado e exibido.