Add-in do RoboDK para SolidWorks
O add-in RoboDK para SolidWorks permite que você combine os recursos de modelagem CAD 3D do SolidWork com o RoboDK para simulação de robôs e programação off-line.
Com o plug-in do RoboDK para SolidWorks, você pode carregar facilmente modelos 3D criados no SolidWorks para o RoboDK. Esse plug-in permite que você programe mais de 500 robôs diferentes diretamente do SolidWorks.
Os programas do robô podem ser gerados diretamente a partir de um grupo de curvas ou pontos. Você também pode criar um programa NC, como o código G ou um arquivo APT, e carregá-lo no RoboDK.
Os robôs podem ser facilmente programados como máquinas de 5 eixos para uma ampla variedade de aplicações de fabricação, como perfuração, soldagem, corte, impressão 3D ou usinagem com robôs. Mais informações disponíveis na seção de usinagem com robôs.
A seção de pós-processadores de robôs mostra uma lista das marcas de robôs e controladores compatíveis. Também é possível modificar ou criar novos pós-processadores para personalizar a geração de programas.
O plug-in do RoboDK para SolidWorks funciona no SolidWorks 2016 e versões posteriores. O plug-in do RoboDK SolidWorks é gratuito; no entanto, algumas opções do RoboDK exigem a compra de uma licença.
Instalar
Se você já tiver instalado o SolidWorks e o RoboDK, deverá ter o plug-in do RoboDK para o SolidWorks disponível no Solidworks.
O plug-in do RoboDK para o SolidWorks contém uma barra de ferramentas. Cada botão da barra de ferramentas está vinculado a um comando do RoboDK.
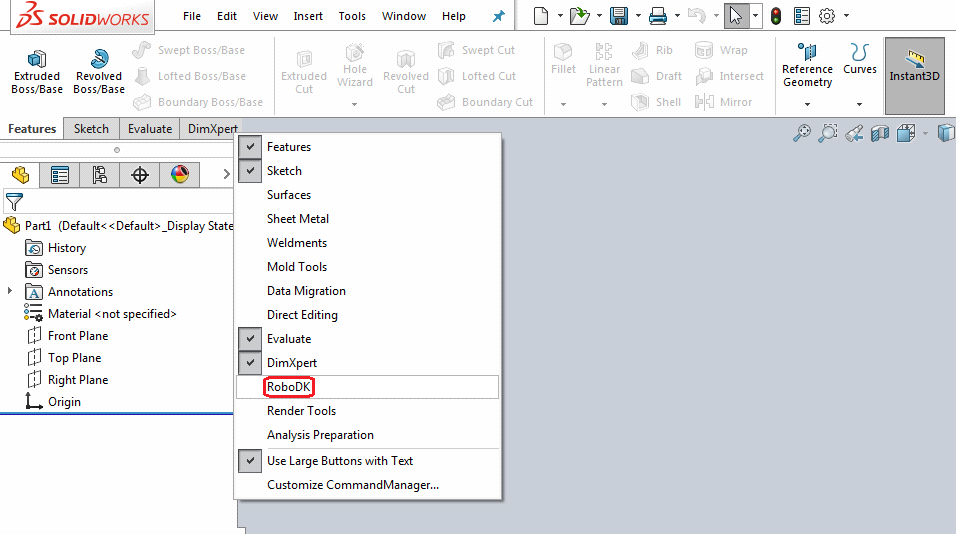
Se o plug-in do RoboDK não estiver disponível, você pode seguir as etapas de instalação manual para instalar o plug-in do RoboDK para o SolidWorks.
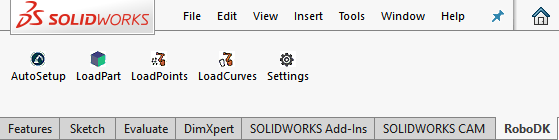
Barra de ferramentas do SolidWorks
A barra de ferramentas padrão do RoboDK inclui 5 botões:
●
●
●
●
●
A principal diferença entre o Auto Setup e o Load Curve(s) ou Load Point(s) é que o Auto Setup carrega a peça e cria um novo projeto de seguimento de Curva/Ponto. O uso do Load Curve(s) ou Load Point(s) é mais rápido e apenas atualizará os recursos de geometria existentes no RoboDK, mantendo as configurações definidas anteriormente.
Configurações
Você pode alterar as configurações padrão que se aplicam ao plug-in do RoboDK selecionando o botão Settings.
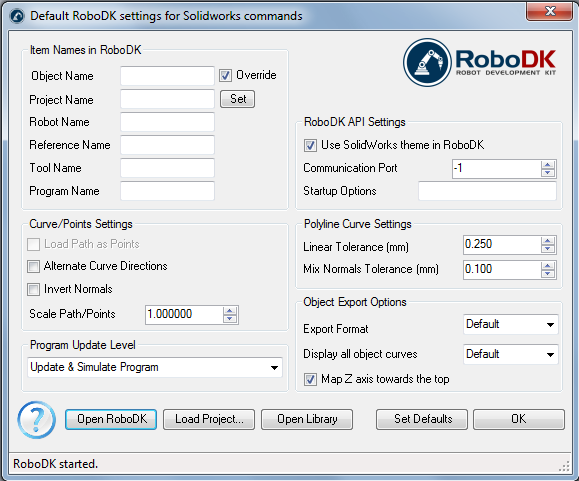
●Object Name (Nome do objeto) - Defina o nome do objeto de curva/pontos que será carregado no RoboDK. Se essa caixa for deixada em branco, será usado o nome da peça ou do arquivo de montagem.
●Override (Sobrescrever) - Substitui o objeto carregado anteriormente no RoboDK se houver uma correspondência de nome.
●Project Name (Nome do projeto) - Defina o nome/caminho do projeto/estação do RoboDK (arquivo .RDK) a ser usado. Se o arquivo já estiver carregado, ele usará o projeto existente. Se o projeto aberto no RoboDK não corresponder ao nome do arquivo, ele abrirá o projeto se o caminho completo for especificado.
●Robot Name (Nome do robô) - Defina o nome do robô que será usado no RoboDK (se você tiver mais de um robô em seu projeto). O nome do robô deve corresponder ao nome visível na árvore de estações do RoboDK. Deixe esse valor em branco (padrão) para usar o primeiro ou único robô disponível.
●Reference Name (Nome de referência) - Defina o nome do frame de referência para posicionar o caminho em relação ao robô. O nome deve corresponder ao nome visível na árvore de estações do RoboDK. Se um nome não for fornecido, o frame de referência ativo
●Tool Name (Nome da ferramenta) - Defina o nome da ferramenta (TCP) a ser usada com o robô para seguir o caminho. O nome deve corresponder ao nome visível na árvore de estações do RoboDK. Se não for fornecido um nome, será usado o Frame de Ferramentaativo
●Program Name (Nome do programa) - Defina o nome do arquivo de programa que será gerado.
●Load Path as Points (Carregar caminho como pontos) - Marque essa opção para converter uma curva em pontos, de modo que um projeto de seguimento de pontos seja criado no RoboDK. Isso é útil para operações de fabricação, como perfuração. Desmarque essa opção para carregar o caminho como um projeto de seguimento de curva.
●Alternate Curve Directions (Direções de curva alternadas) - Marque essa opção para alternar a direção do movimento a cada passagem (padrão Zig-Zag).
●Invert Normals (Inverter normais) - Marque essa opção para inverter as normais de superfície calculadas. Isso inverterá a orientação da ferramenta do robô.
●Use SolidWorks theme on RoboDK (Usar o tema do SolidWorks no RoboDK) - Inicie o RoboDK com um tema do SolidWorks. Isso inclui a alteração do comportamento do mouse para a navegação 3D e a cor do plano de fundo. Essas configurações podem ser alteradas no menu Tools-Options do RoboDK.
●Communication Port (Porta de comunicação) - Defina a porta de comunicação para se comunicar com o RoboDK. Várias instâncias do RoboDK podem estar sendo executadas ao mesmo tempo e usar configurações diferentes se uma porta diferente for usada. Quando esse valor é definido como -1 (padrão), a porta padrão é usada (20500).
●Startup Options (Opções de Inicialização) - Defina os argumentos a serem passados para o RoboDK na primeira vez que ele for iniciado. Por exemplo, para iniciar o RoboDK silenciosamente, você pode definir '/NOSPLASH /NOSHOW /HIDDEN'. Os programas ainda podem ser gerados mesmo que o RoboDK não seja exibido. Para obter mais informações, consulte a seção Linha de Comando da API do RoboDK.
●Linear Tolerance (mm) - Define a precisão linear para dividir as curvas como um conjunto de pontos.
●Mix Normals Tolerance (mm) - Define a tolerância de distância usada para misturar cálculos normais entre várias superfícies.
●Export Format (Formato de exportação) - Selecione o formato de exportação para carregar a peça no RoboDK.
●Display all object curves (Exibir todas as curvas do objeto) - Exibe as curvas carregadas no RoboDK, mesmo que elas não estejam selecionadas. Você pode alterar essa configuração no RoboDK (Ferramentas – Opções – Exibir – Exibir Curvas).
●Map Z axis towards the top (Mapear o eixo Z em direção ao topo) - Aplique uma rotação na peça ou na montagem para corresponder ao eixo Z no RoboDK. Isso garante que a visão isométrica no RoboDK seja a mesma do SolidWorks.
Botões:
●Open RoboDK (Abrir RoboDK) - Abrir um projeto no RoboDK... Uma nova janela será aberta com opções adicionais.
●Load Project ... (Carregar Projeto) - Carregue o projeto do RoboDK (arquivo RDK) que você deseja usar no projeto atual.
●Open Library (Abrir Biblioteca) - abrir Biblioteca on-line do do RoboDK.
●Set Defaults (Definir padrões) - Define as configurações padrão do componente.
●OK - Aplicar essas configurações e fechar essa janela. Se você não selecionar OK, as configurações alteradas não serão aplicadas.
Exemplos
Esta seção mostra exemplos básicos para carregar um projeto do SolidWorks no RoboDK para fins de simulação do robô e programação off-line.
Soldagem com robô
O exemplo a seguir mostra como você pode criar uma trajetória de ferramenta simples para a soldagem com robôs a partir do SolidWorks.
Aplicação de líquidos
O exemplo a seguir mostra como você pode programar um robô para um processo de aplicação de líquidos usando o SolidWorks e o RoboDK.
Exemplo de hélice
Este exemplo mostra como carregar uma estação RoboDK de amostra (configuração padrão) e seguir um conjunto de curvas definidas no SolidWorks com o robô.
1.Carregue o exemplo de hélices de 3 pás no SolidWorks.
2.Selecione a guia RoboDK e selecione
3.Selecione Load Project...
4.Selecione Default Setup (Configuração padrão). O RoboDK iniciará e carregará um projeto de exemplo com um robô KUKA, uma ferramenta (um fuso como Ferramenta 1) e um frame de referência (Referência 1).
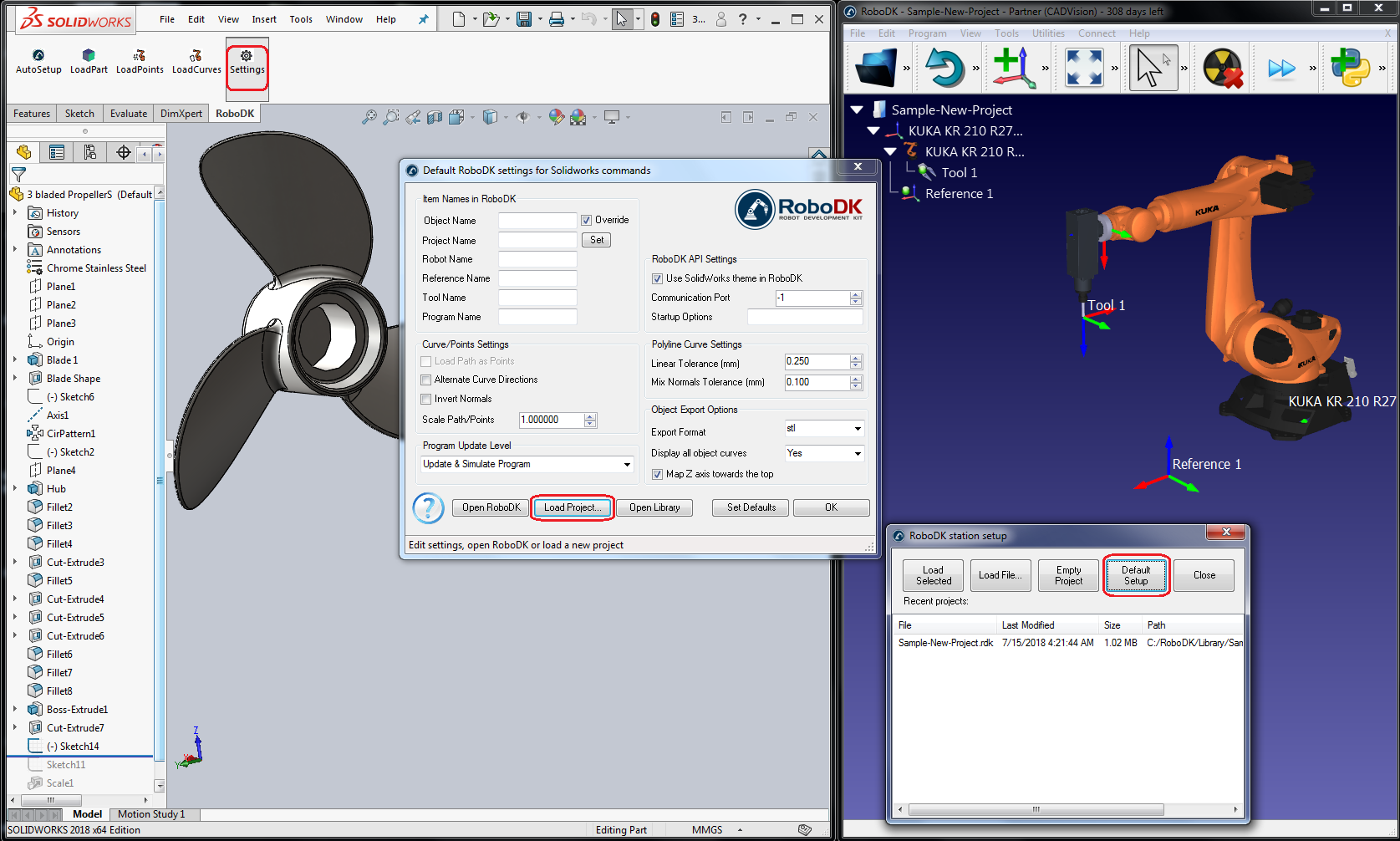
5.Feche a janela Settings (Configurações) ou selecione OK.
6.Selecione o botão
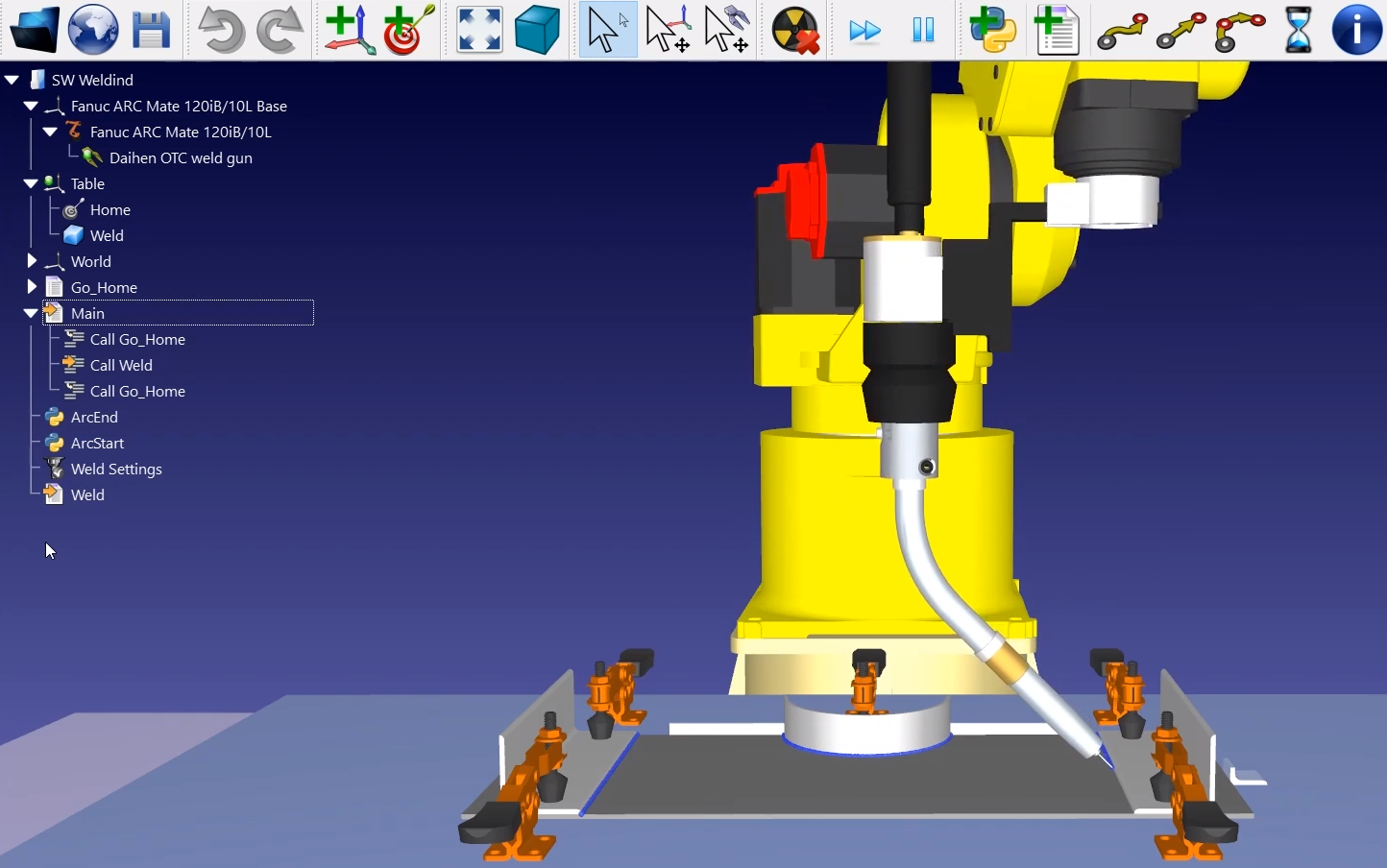
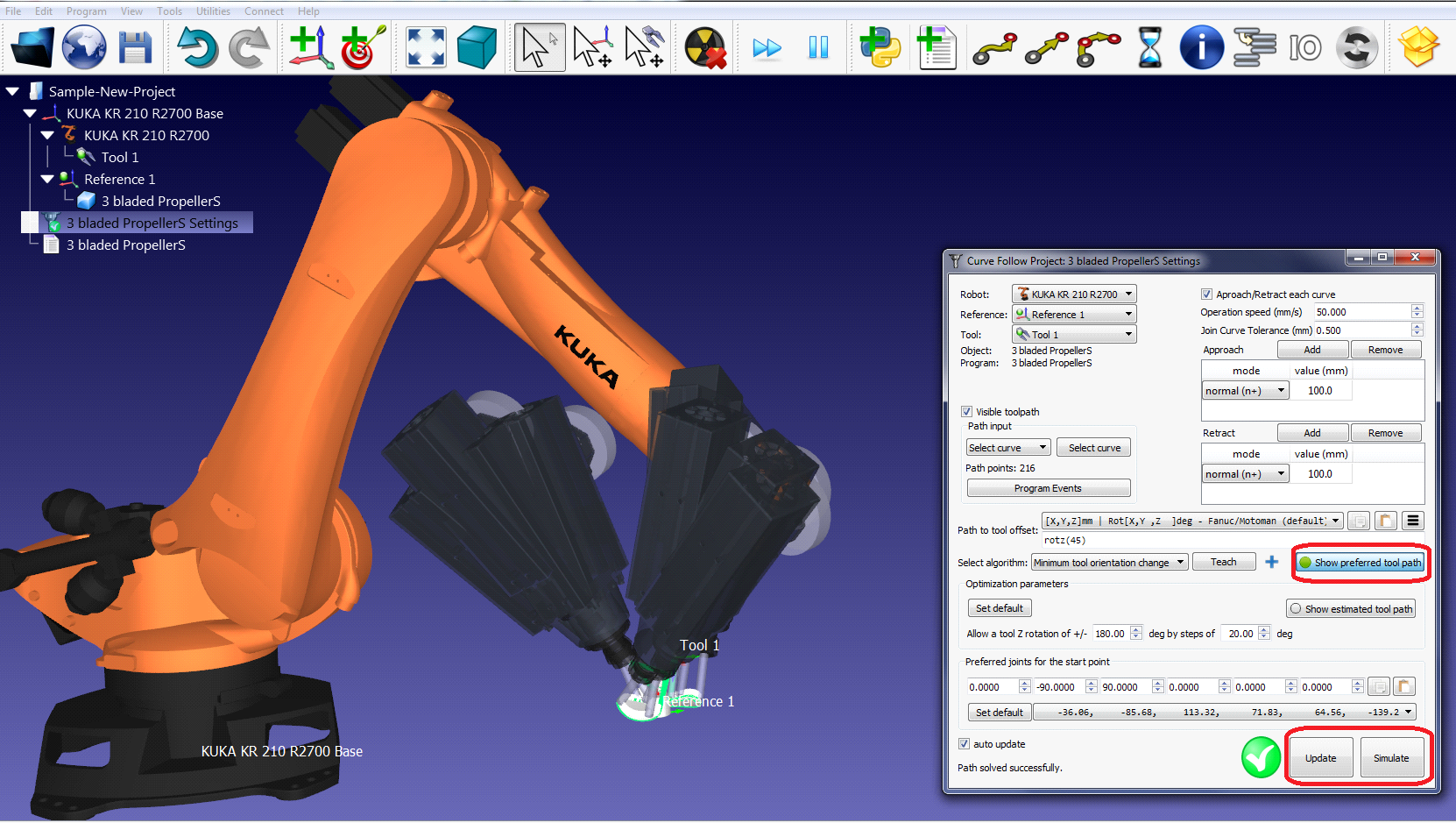
7.Selecione todas as curvas e superfícies e pressione OK na página Property Manager. O projeto será carregado no RoboDK, conforme mostrado na imagem a seguir.
Você deverá ver a peça carregada no frame de referência ativo (Referência 1) e um novo projeto Curve follow no RoboDK que segue o caminho da ferramenta.
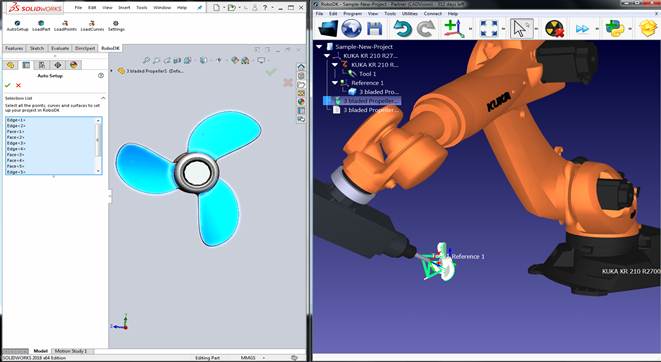
Você pode ver que o movimento de aproximação é normal ao percurso da ferramenta. O robô deve ser capaz de se mover ao longo do percurso da ferramenta sem nenhum problema.
Clique duas vezes em
Por exemplo, você pode selecionar Exibir caminho de ferramenta preferido para ver e modificar a orientação padrão da ferramenta em relação à peça. Altere o valor Offset da trajetória para a ferramenta para definir uma rotação adicional. Para isso, você pode inserir um novo valor ou simplesmente usar a roda do mouse para ver uma visualização rápida do resultado.
Mais informações sobre como alterar essas configurações estão disponíveis na seção de usinagem com robô.
Por fim, quando a simulação produzir o resultado desejado, você poderá gerar o programa ou exportar a simulação:
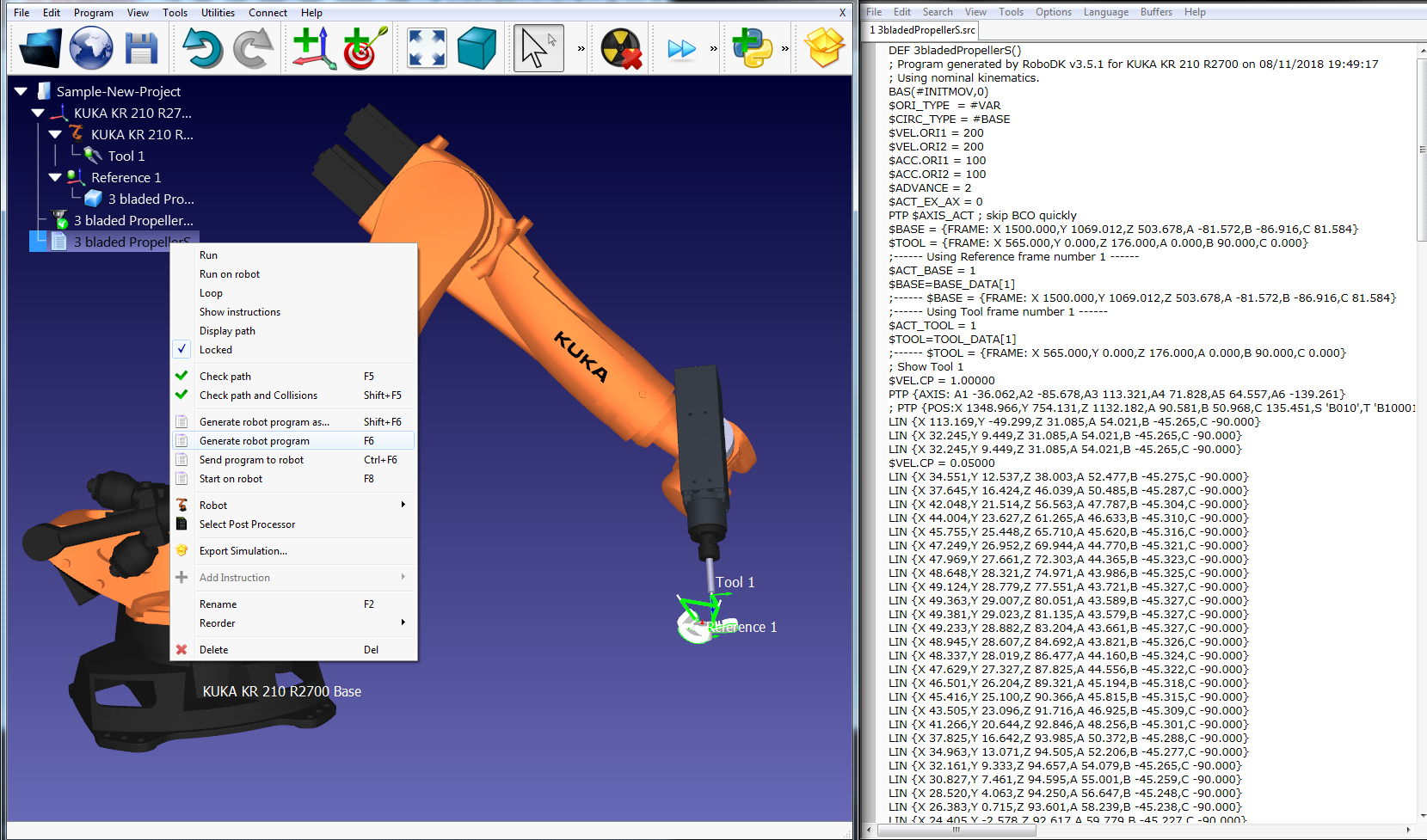
8.Clique com o botão direito do mouse no programa
9.Selecione Gerar programa do robô (F6). O programa do robô será gerado e exibido.
Instalação manual
Estas são as etapas manuais para configurar o plug-in do RoboDK para o SolidWorks. Você deve seguir essas etapas se o plug-in do RoboDK para SolidWorks não tiver sido instalado automaticamente por padrão usando o instalador do RoboDK:
1.Instale o SolidWorks.
2.Faça o download e instale o RoboDK.
3.Faça o download do plug-in do RoboDK para o SolidWorks.
4.Descompacte a pasta do plug-in do RoboDK para SolidWorks em C:\RoboDK\Other\Plugin-SolidWorks\
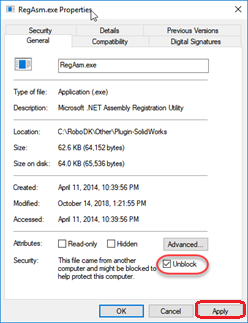
Desbloqueie os binários EXE e DLL:
5.Clique com o botão direito do mouse no arquivo RegAsm.exe e selecione Propriedades.
6.Selecione Desbloquear e Aplicar.
7.Repita as etapas 5 e 6 para os outros dois arquivos DLL.
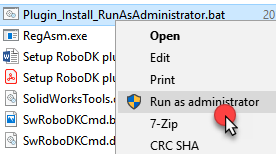
Carregue o plug-in do RoboDK no SolidWorks:
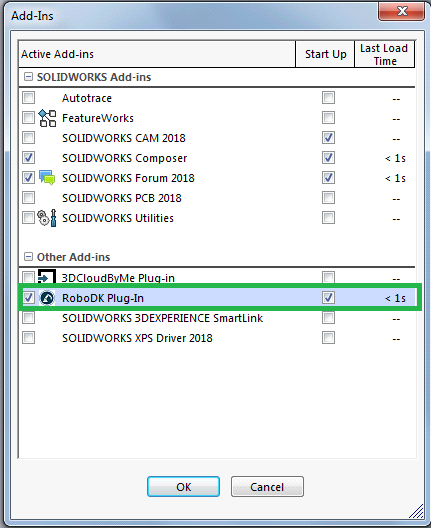
8.Execute o arquivo Plugin_Install_RunAsAdministrator.bat como Administrador: Clique com o botão direito do mouse no arquivo BAT e selecione Executar como administrador.
9.Inicie o SolidWorks e vá para Tools ➔ Add-Ins (no SolidWorks). Você encontrará o RoboDK Plug-In Add-in.