Introdução ao hyperMILL
O add-in RoboDK para o OpenMind hyperMILL permite que você configure rapidamente projetos de usinagem com robôs diretamente do hyperMILL. Com a integração do RoboDK com o software OpenMind, você pode combinar facilmente o software de usinagem CAD/CAM hyperMILL com o RoboDK para simular e programar robôs industriais para usinagem com robôs.
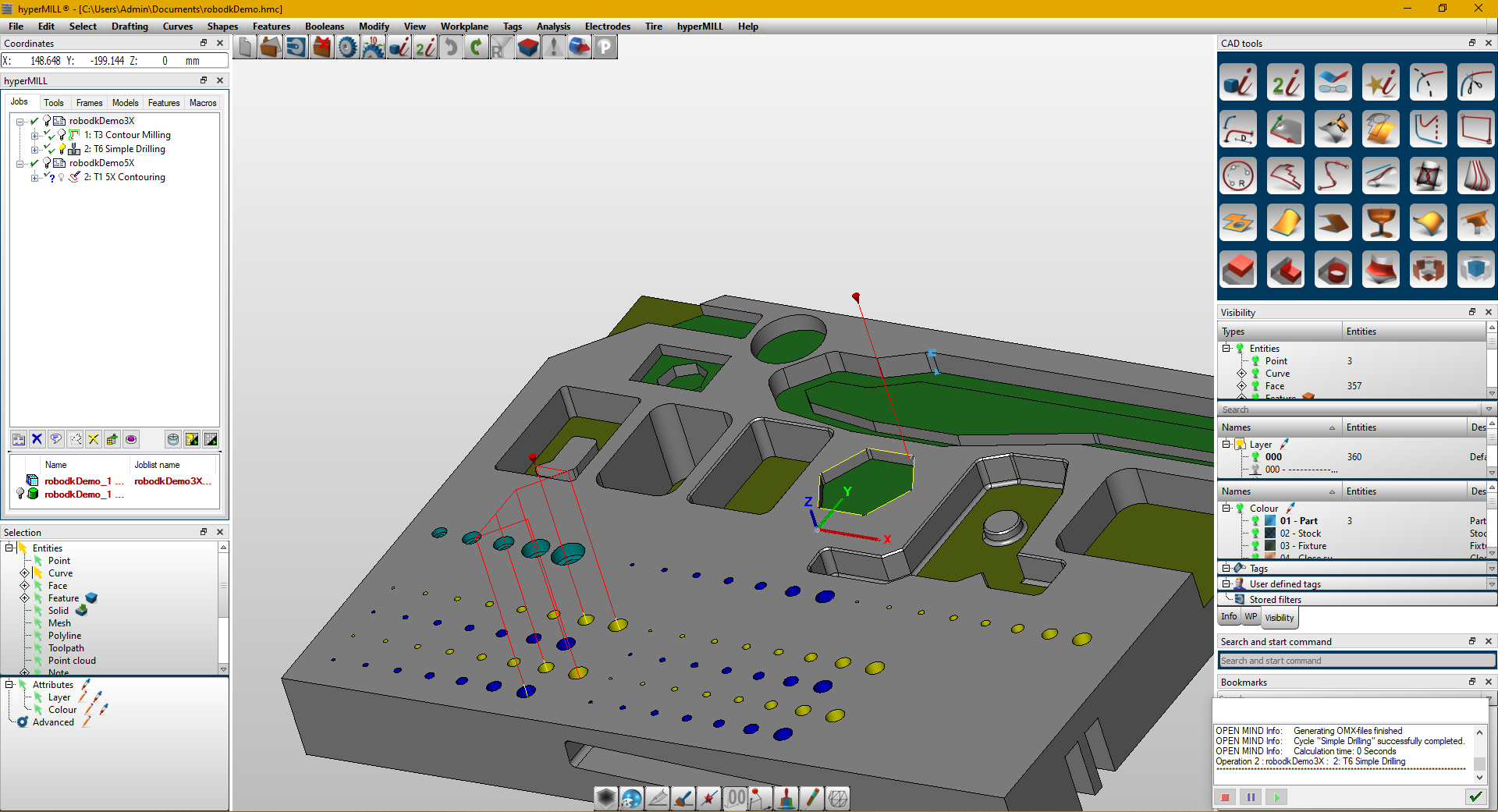
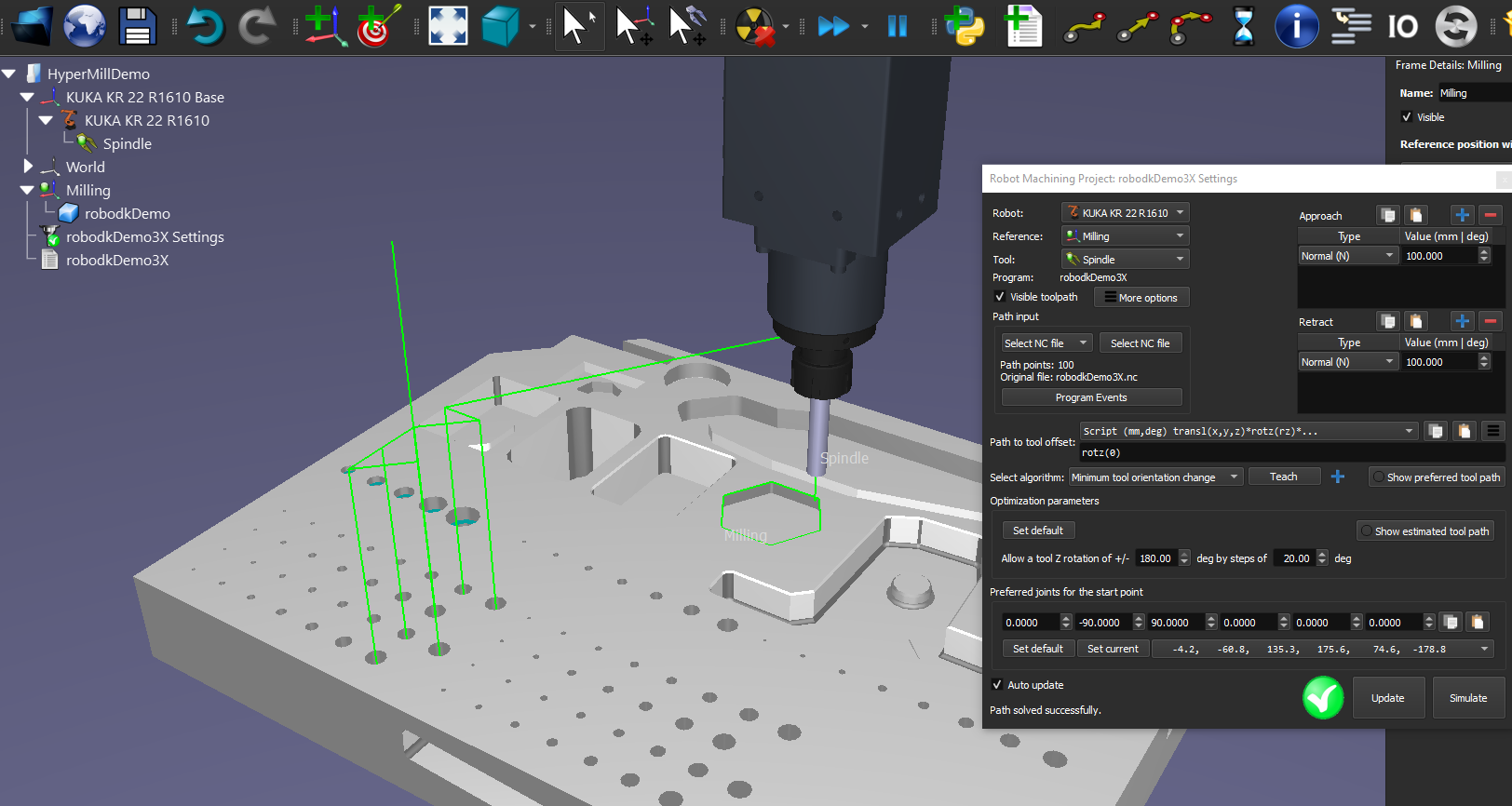
Com esse add-in do hyperMILL, você pode facilmente gerar programas sem erros para usinagem com robôs diretamente do hyperMILL. Como alternativa, o RoboDK também suporta arquivos de usinagem padrão APT CLS e código G.
Mais informações sobre o RoboDK para usinagem com robôs estão disponíveis na Seção de usinagem com robôs. Saiba mais sobre o hyperMILL e o hyperCAD-s visitando https:/www.openmind-tech.com/en.html.
Este documento descreve como configurar o plug-in do RoboDK para o software hyperMILL e como usar o hyperMILL para configurar projetos de usinagem com robôs no RoboDK.