RoboDK Plugin for hyperMILL
Introdução ao hyperMILL
O add-in RoboDK para o OpenMind hyperMILL permite que você configure rapidamente projetos de usinagem com robôs diretamente do hyperMILL. Com a integração do RoboDK com o software OpenMind, você pode combinar facilmente o software de usinagem CAD/CAM hyperMILL com o RoboDK para simular e programar robôs industriais para usinagem com robôs.
Com esse add-in do hyperMILL, você pode facilmente gerar programas sem erros para usinagem com robôs diretamente do hyperMILL. Como alternativa, o RoboDK também suporta arquivos de usinagem padrão APT CLS e código G.
Mais informações sobre o RoboDK para usinagem com robôs estão disponíveis na Seção de usinagem com robôs. Saiba mais sobre o hyperMILL e o hyperCAD-s visitando https:/www.openmind-tech.com/en.html.
Este documento descreve como configurar o plug-in do RoboDK para o software hyperMILL e como usar o hyperMILL para configurar projetos de usinagem com robôs no RoboDK.
Configuração do hyperMILL
Siga estas etapas para instalar o RoboDK AddIn para o hyperMILL.
1.Faça o download do plug-in
https://robodk.com/files/upload/hyperMILL_AddIn_RoboDK.zip
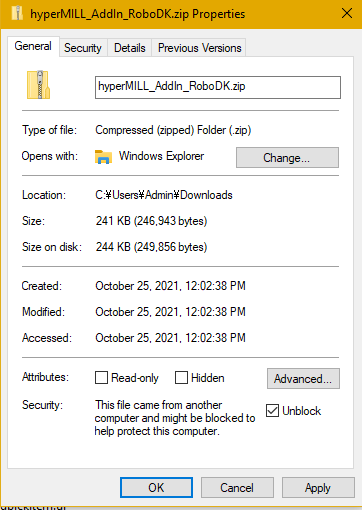
2.Marque o plug-in como seguro: clique com o botão direito do mouse na pasta ZIP, selecione Propriedades e marque a opção Desbloquear.
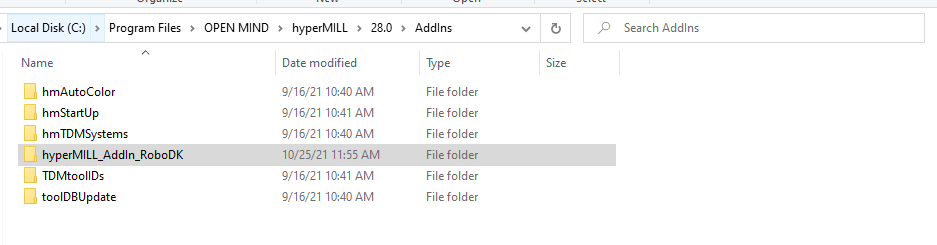
3.Extraia o conteúdo da pasta ZIP para "C:\Program Files\OPEN MIND\hyperMILL\28.0\AddIns" ou para o diretório de instalação equivalente.
A pasta do plug-in deve ter a aparência mostrada na imagem a seguir.
Fluxo de trabalho do hyperMILL
No hyperMILL/hyperCAD-S, você pode usar o plugin RoboDK para facilitar o envio de trabalhos de usinagem para o RoboDK. Isso permite que você simule e programe robôs para usinagem com robôs.
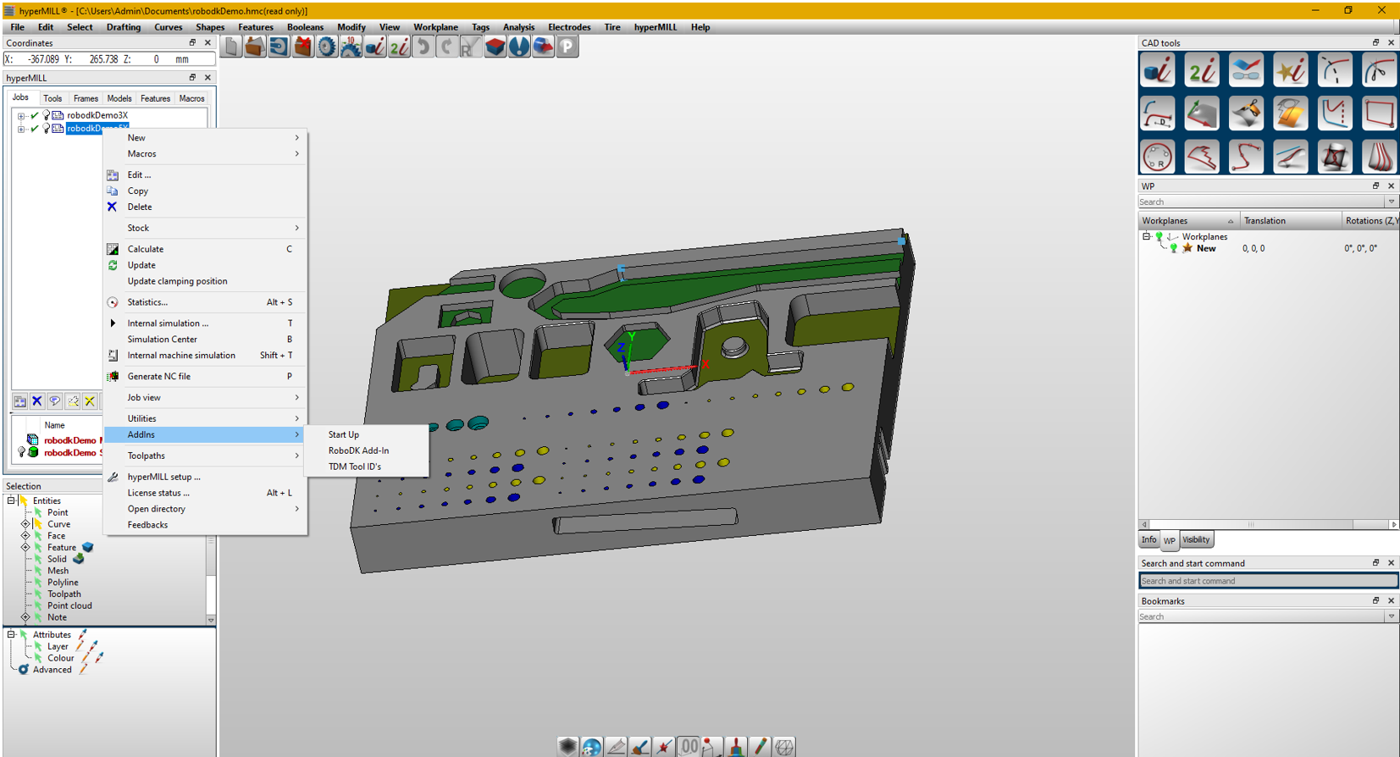
Siga estas etapas para configurar automaticamente seu projeto de usinagem com robôs a partir do hyperMILL/hyperCAD-S:
1.Clique com o botão direito do mouse em seu trabalho.
2.Selecione Add-Ins.
3.Selecione o RoboDK Add-in.
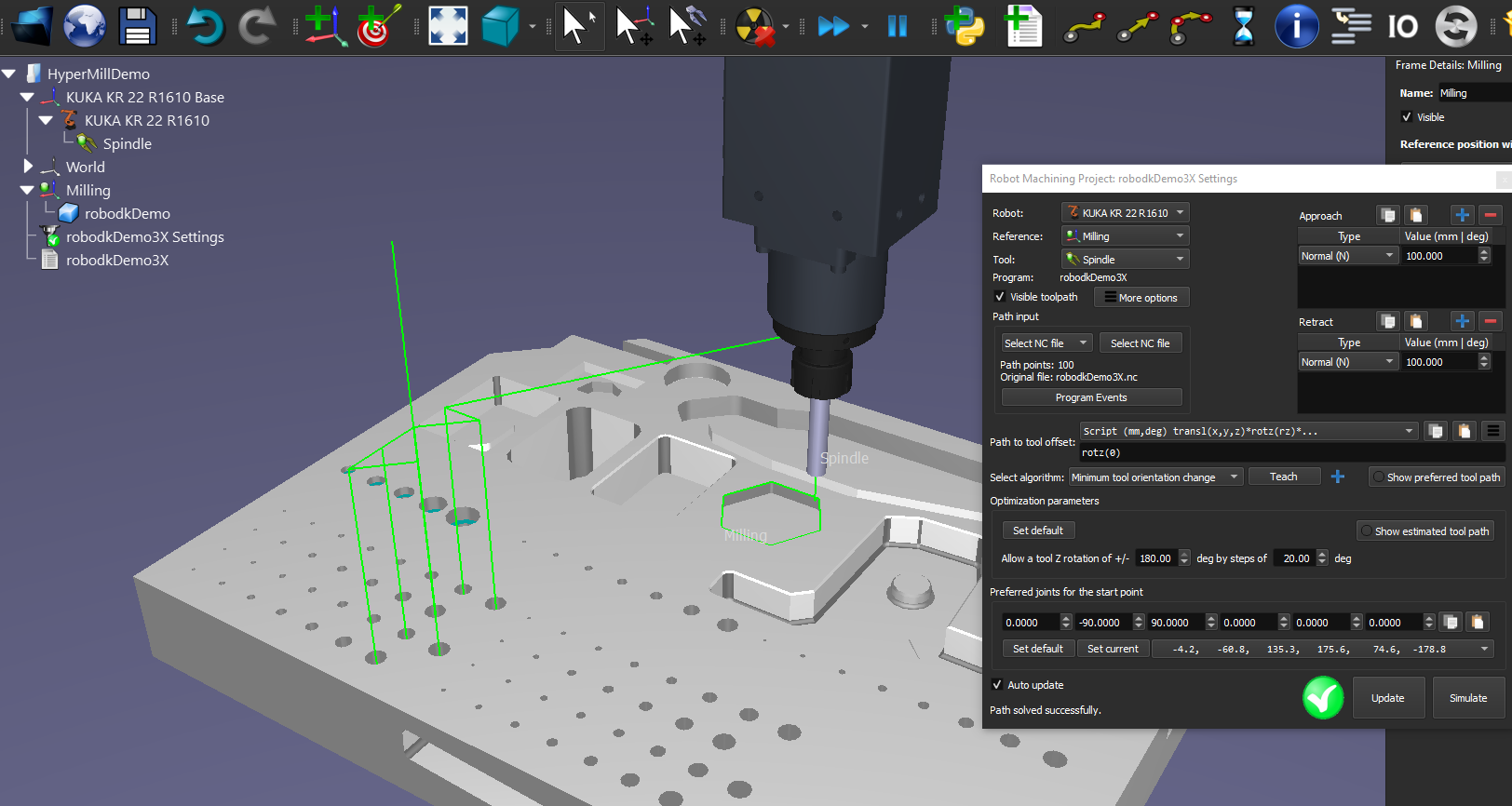
Uma marca de seleção verde será exibida se o programa for viável com o robô selecionado. Se houver algum problema (como singularidades, limites de eixo ou problemas de alcance), será exibida uma marca vermelha com uma mensagem sobre o problema.
Clique duas vezes no projeto de usinagem com robô
Clique com o botão direito do mouse em um programa e selecione Executar para simulá-lo (ou clique duas vezes no programa). Você também pode selecionar Gerar programa de robô (F6) para obter o programa do robô que precisa ser carregado no controlador do robô. Mais informações sobre como gerar programas de robô estão disponíveis na seção Programação off-line.
Se necessário, clique com o botão direito do mouse em um programa e selecione Selecionar Pós-processador para alterar o pós-processador. Essa etapa pode ajudá-lo a personalizar a aparência do código gerado. Mais informações sobre como selecionar e personalizar pós-processadores estão disponíveis na seção de pós-processadores.