Forçar um limite de velocidade
Este exemplo mostrará como você pode impor um limite de velocidade de 500 mm/s e evitar o uso de velocidades mais altas ao gerar um programa com o RoboDK.
Neste exemplo, presumimos que estamos usando um controlador KUKA KRC2 ou KRC4:
1.Selecione Programa ➔ Adicionar/Editar Pós-processador
2.Selecione seu pós-processador. Por exemplo, para o KUKA KRC4, selecione KUKA_KRC4.
3.Selecione OK. O pós-processador será mostrado em um editor de texto.
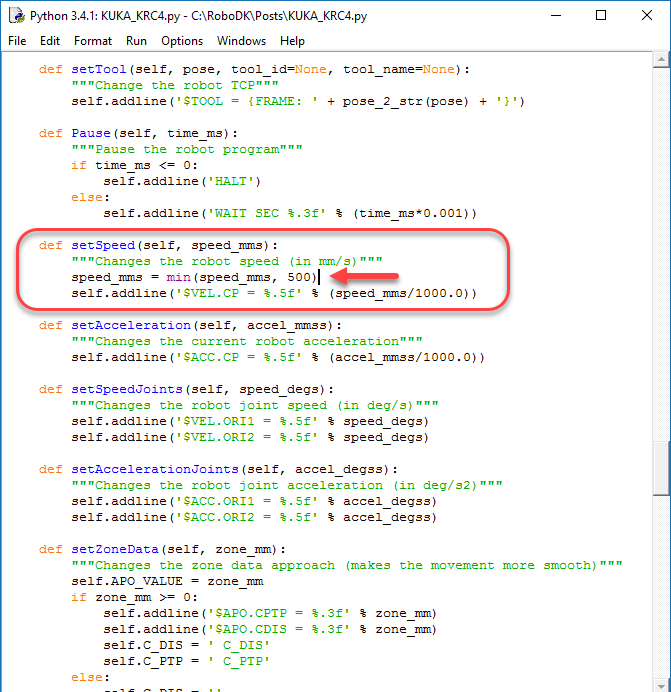
4.Localize a definição da função setSpeed (def setSpeed)
5.Add-in a seguinte linha para que a velocidade máxima seja de 500 mm/s. A linha precisa ser adicionada antes de gerar a saída $VEL.CP, que alterará a velocidade em m/s:
speed_mms = min(speed_mms, 500)
Observação: Uma velocidade padrão de 200 mm/s é definida na variável HEADER, na parte superior do pós-processador ($VEL.CP=0,2). Essa velocidade padrão também pode ser alterada se a velocidade não for modificada pelo RoboDK.
Observação: Se você não tiver o código-fonte do pós-processador, ainda poderá adicionar sua função personalizada para substituir o comportamento padrão.