Impor um movimento joint
Esta seção mostrará como você pode modificar um pós-processador existente para forçar um movimento joint usando valores de eixos em vez de valores cartesianos.
Neste exemplo, aplicaremos essa alteração a um controlador de robô ABB IRC5.
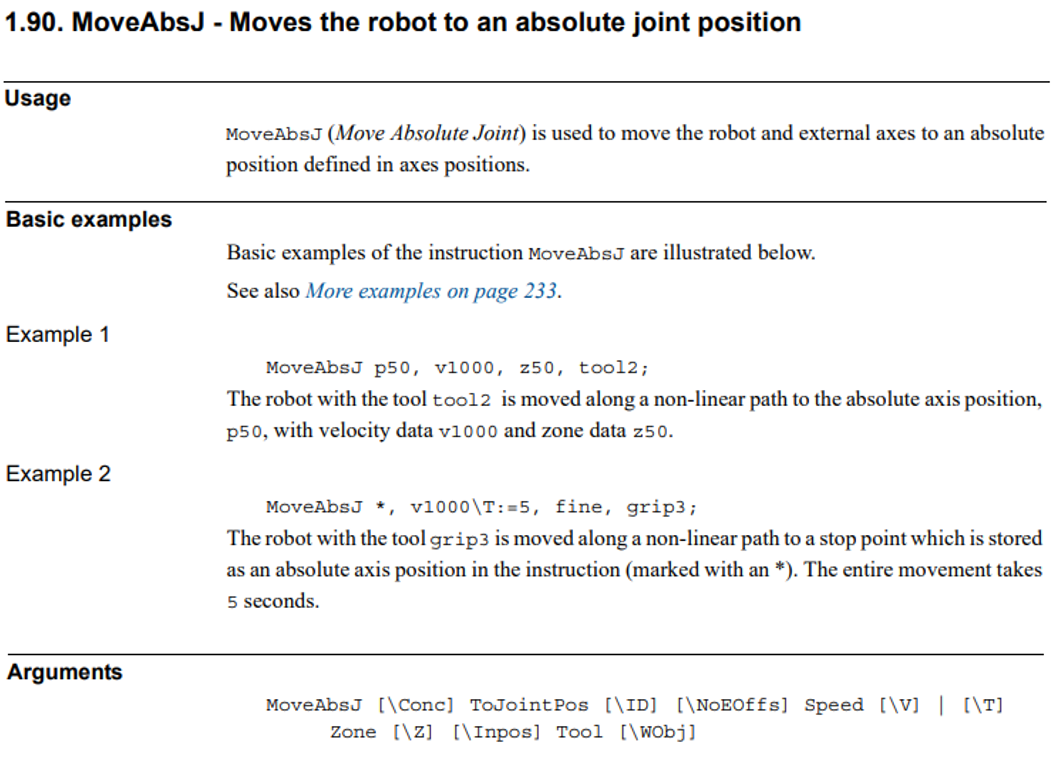
1.Encontre o manual de programação do controlador de seu robô. Neste exemplo, usamos o manual de programação do ABB IRC5 RAPID.
2.Procure as instruções de movimento joint. Nesse caso, o comando de movimento joint absoluto da ABB é chamado MoveAbsJ. Esse comando requer uma variável jointtarget que define os eixos da junta.
3.Selecione Programa ➔ Adicionar/Editar Pós-processador e selecione o pós-processador que você está usando no momento para modificá-lo. Se você estiver usando um pós-processador personalizável, ele será selecionado por padrão.
4.Você deve procurar a função MoveJ dentro do pós-processador. Essa função define a maneira como os pós-processadores geram os comandos de movimento joint. Como alternativa, o RoboDK usa o MoveL para movimentos lineares. Usando a linguagem de programação Python, modifique a linha que é adicionada ao arquivo de programa para fornecer informações sobre o ângulo da articulação, conforme mostrado na imagem a seguir.

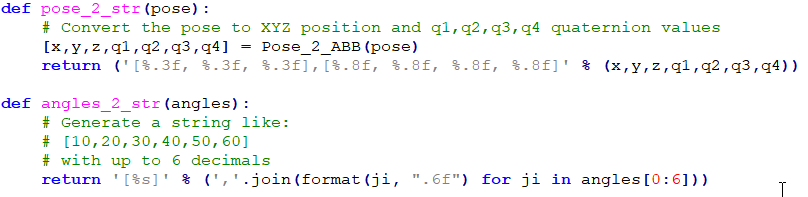
5.Por fim, talvez você precise modificar a forma como o pós-processador converte os ângulos das articulações ou a pose em uma string. As funções angles_2_str e pose_2_str definem como os ângulos das articulações e uma pose, respectivamente, são convertidos em texto
A maioria dos pós-processadores do RoboDK usa ângulos de eixo para movimentos joint e coordenadas cartesianas para movimentos lineares. Recomenda-se sempre iniciar o primeiro ponto em uma sequência de movimentos lineares como um movimento joint, especificando os ângulos dos eixos. Isso evita iniciar um programa com a configuração errada do robô e atingir uma singularidade ou limites de eixo.