Realistic Robot Simulation (RRS)
O Realistic Robot Simulation (RRS) é um padrão que permite fornecer simulações precisas de robôs e estimativas de tempo de ciclo. O padrão RRS permite a integração do software do controlador original em simulações e software de programação off-line.
Os add-ins RRS para o RoboDK possibilitam a trajetória precisa do robô e o tempo de ciclo às simulações e aos programas existentes do RoboDK. O add-in RRS permite que você faça a interface direta com o módulo RCS (Robot Controller Software) de um fabricante de robôs. O RCS é essencialmente o software de planejamento de movimento proprietário do fabricante do robô.
Com o Add-in RoboDK RRS, os usuários podem obter simulações altamente precisas do comportamento do robô, gerando percursos de ferramentas e tempos de ciclo precisos no RoboDK.
Requisitos
Para habilitar o suporte RRS para o RoboDK, você precisa primeiro adquirir o módulo RCS do fabricante do robô. Geralmente, trata-se de uma biblioteca (como um arquivo dll no Windows) que é vendida e ativada separadamente.
Sugerimos colocar o módulo RCS do fabricante do robô em C:\RoboDK\api\RRS\%BRAND%\. No entanto, o caminho de origem pode ser especificado por meio do Add-in.
Interface RRS do RoboDK
O RoboDK fornece uma interface Python configurável para a implementação do RRS-1 de qualquer RCS de fabricante de robôs. Além disso, ele fornece os utilitários e as linhas de base necessários para interagir entre o RoboDK e a interface RRS.
Embora a implementação do RRS em diferentes fabricantes de robôs deva ser consistente, a linha de base fornecida pela interface pode precisar de alguns ajustes para uma marca específica. O RoboDK fornece a implementação da interface RRS específica do fornecedor.
RoboDK RRS para Comau (Add-in)
O RoboDK RRS for Comau é um Add-in do RoboDK específico para os robôs Comau. Para instalar um Add-in do RoboDK, consulte a seção Add-in da documentação.
Depois de adquirir e ativar os módulos RCS necessários da Comau, você pode começar a usar o RoboDK RRS for Comau Add-in.
Para criar um programa RSS, siga estas etapas:
1.Abra as configurações com o Programa ➔ RRS para Comau➔ Configurações
a.Define a ID do robô. Normalmente é 0.
b.Defina o caminho para a pasta do robô. Normalmente, essa é a pasta principal que contém os arquivos .c5g, .CIO e .xml.
c.Defina o caminho para o arquivo do robô. Esse é o arquivo .c5g contido na pasta do robô.
d.Defina o caminho para o arquivo DLL do RRS, geralmente rcscomau.dll.
2.Gere o programa RRS clicando com o botão direito do mouse em seu programa➔ Gerar programa RRS (Comau)
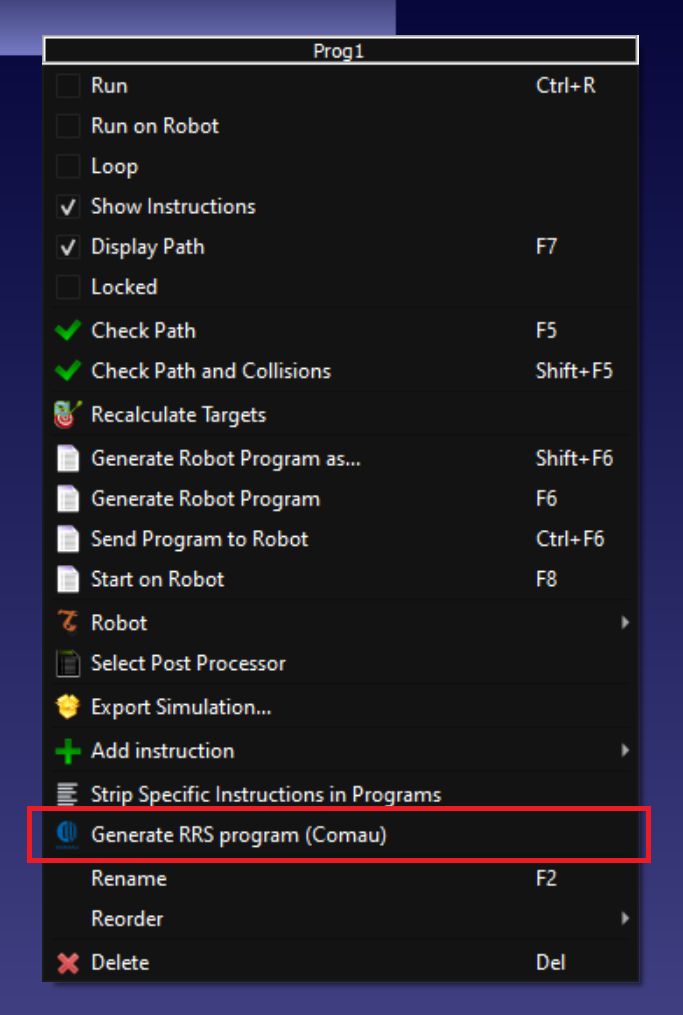
Um novo programa será criado com movimentos precisos e a estimativa de tempo de ciclo será fornecida no nome do programa.