API do C# API
A API do RoboDK para C# é um arquivo de código-fonte RoboDK.cs que contém a classe RoboDK (semelhante à classe Robolink do Python), a classe RoboDK.Item (semelhante à API da classe Robolink.Item do Python) e outras ferramentas para robótica, como uma classe Matrix (RoboDK.Mat) para operações de matriz para operar com transformações de pose.
C# (pronuncia-se "C sharp") é uma linguagem de programação desenvolvida pela Microsoft e projetada para a criação de uma variedade de aplicativos executados no .NET Framework. O C# é simples, poderoso, fortemente tipado e orientado a objetos. A seção principal deste documento explica as vantagens de usar a API do RoboDK com uma linguagem de programação amplamente utilizada, como o C#, para a programação de robôs.
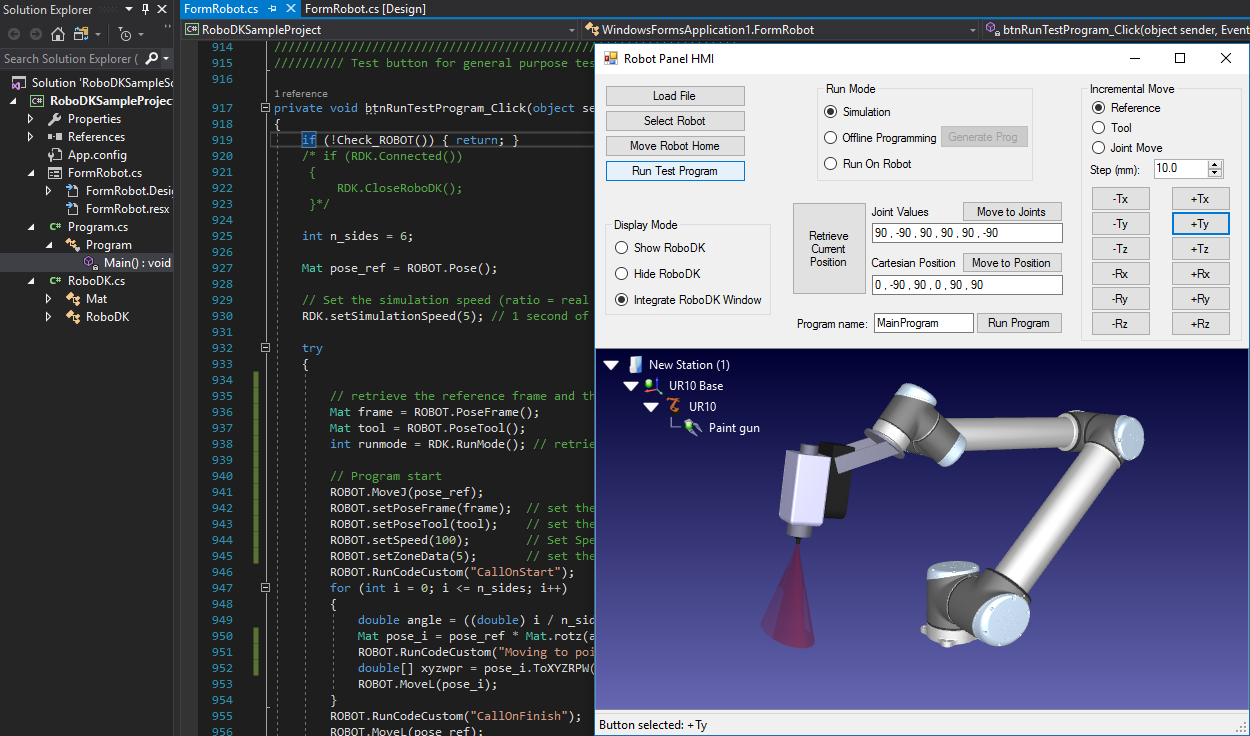
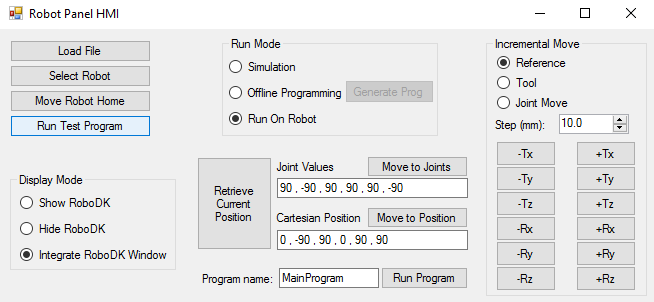
A API do RoboDK para C# é fornecida com um projeto de exemplo, conforme mostrado na imagem a seguir (o código-fonte completo está incluído). Também é possível usá-la como um pacote NuGet para integrá-la em qualquer projeto .Net.
Selecione Carregar Arquivo para abrir uma estação do RoboDK ou qualquer outro arquivo suportado pelo RoboDK. Se um robô for carregado, a variável ROBOT será atualizada de acordo (da mesma forma que o Selecionar Robô).
Simulação em C# Simulation
Os programas C# são simulados por padrão quando os comandos do robô são usados (como MoveJ, MoveL ou setDO). Quando o projeto C# de exemplo é iniciado, o modo de simulação também é selecionado por padrão.
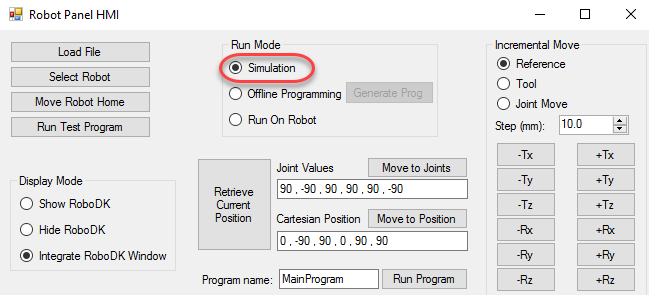
Isso significa que os movimentos do robô serão simulados no RoboDK. Por exemplo, podemos mover o robô em passos de 10 mm selecionando os botões à direita (+Tx, -Tx, ...), ou podemos selecionar Executar Programa de Teste para executar um movimento hexagonal em torno da localização atual do robô.
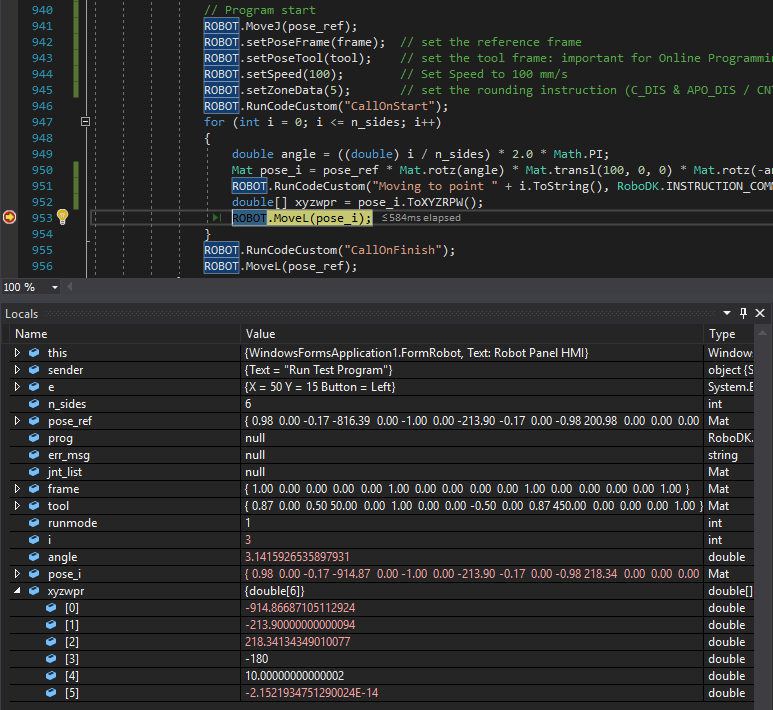
Defina quaisquer pontos de interrupção para depurar seu aplicativo e inspecionar os pontos do robô. Os pontos do robô podem ser definidos como coordenadas angulares ou variáveis Mat (Matrizes de pose 4x4) e podem ser inspecionados no formato XYZWPR para solucionar problemas do programa. Para obter mais informações sobre frames de referência, consulte a seção Frames de referência.
Também é possível alterar o Modo de Execução para Programação Offline ou Programação Online (Executar no Robô), conforme mostrado nas seções a seguir.
C# OLP
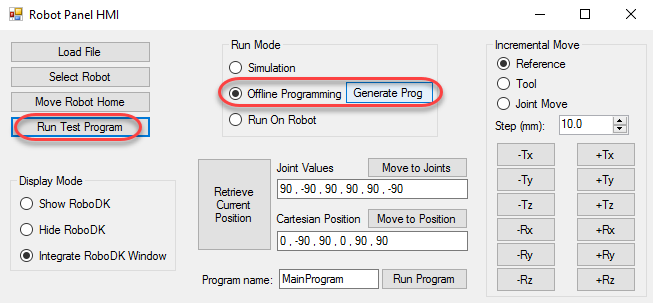
Os programas C# podem ser gerados off-line usando o mesmo código C# usado para simular o robô (Programação off-line). Siga estas etapas para testar esse recurso:
1.Selecione Programação off-line na seção Modo de execução
2.Selecione Executar programa de teste ou qualquer outra combinação de movimentos
3.Selecione Gerar Programa para obter o programa do robô específico do fornecedor
Nesse caso, o programa não é simulado, mas executado rapidamente para obter o resultado: um programa de robô específico para um controlador de robô. O modo de execução será alterado de volta para Simulação assim que o programa for gerado.
Programação on-line em C#
Os programas C# podem ser executados diretamente no robô usando o mesmo código C# usado para a simulação. A programação on-line permite a execução de um programa genérico em um controlador de robô específico usando os Drivers de Robô. Siga estas etapas para testar esse recurso usando o projeto de exemplo C#:
1.Selecione Executar no robô na seção Modo de execução
2.Selecione quaisquer outros comandos que farão o robô se mover
Os movimentos serão executados no robô real e o simulador sincronizará os movimentos com o robô.
RDK = Robolink();
RDK.setRunMode(RUNMODE_EXECUTAR_ROBOT);