API do MATLAB
O MATLAB é uma linguagem de programação proprietária desenvolvida pela MathWorks. Entre outras coisas, o MATLAB permite manipulações de matrizes, plotagem de funções e dados e implementação de algoritmos. A RoboDK é um parceiro oficial do Programa de Conexões da MathWorks.
A API do RoboDK para MATLAB é fornecida como um grupo de arquivos de script (m-Arquivos), disponíveis aqui:
●Na pasta de instalação do RoboDK, normalmente C:/RoboDK/Matlab/.
●Na MathWorks MATLAB Central.
●No GitHub da API do RoboDK.
A seção principal deste documento explica as vantagens de usar a API do RoboDK com uma linguagem de programação amplamente utilizada, como o MATLAB, para a programação de robôs.
A API do RoboDK para MATLAB inclui:
●Robolink.m é uma classe que faz interface com o RoboDK. Qualquer objeto na árvore de estações do RoboDK pode ser recuperado usando o objeto Robolink e é representado pelo objeto RobolinkItem (o mesmo que a classe Robolink do Python).
●RobolinkItem.m é uma classe que representa um item do RoboDK na árvore de estações. É possível realizar diferentes operações nesse item (o mesmo que a classe Robolink.Item do Python).
●transl.m, rotx.m, roty.m e rotz.m são funções que criam matrizes de pose com um vetor de translação XYZ ou rotações ao longo de um eixo específico.
●Pose_2_XYZRPW.m e XYZRPW_2_Pose.m permitem a conversão de poses em posição XYZ e ângulos Euler RPW e vice-versa. Mais informações na seção Frames de referência.
A página a seguir apresenta vários exemplos da API MATLAB do RoboDK, como a manipulação de itens, a geração de programas de robô e o controle do robô:
https://robodk.com/Matlab-API
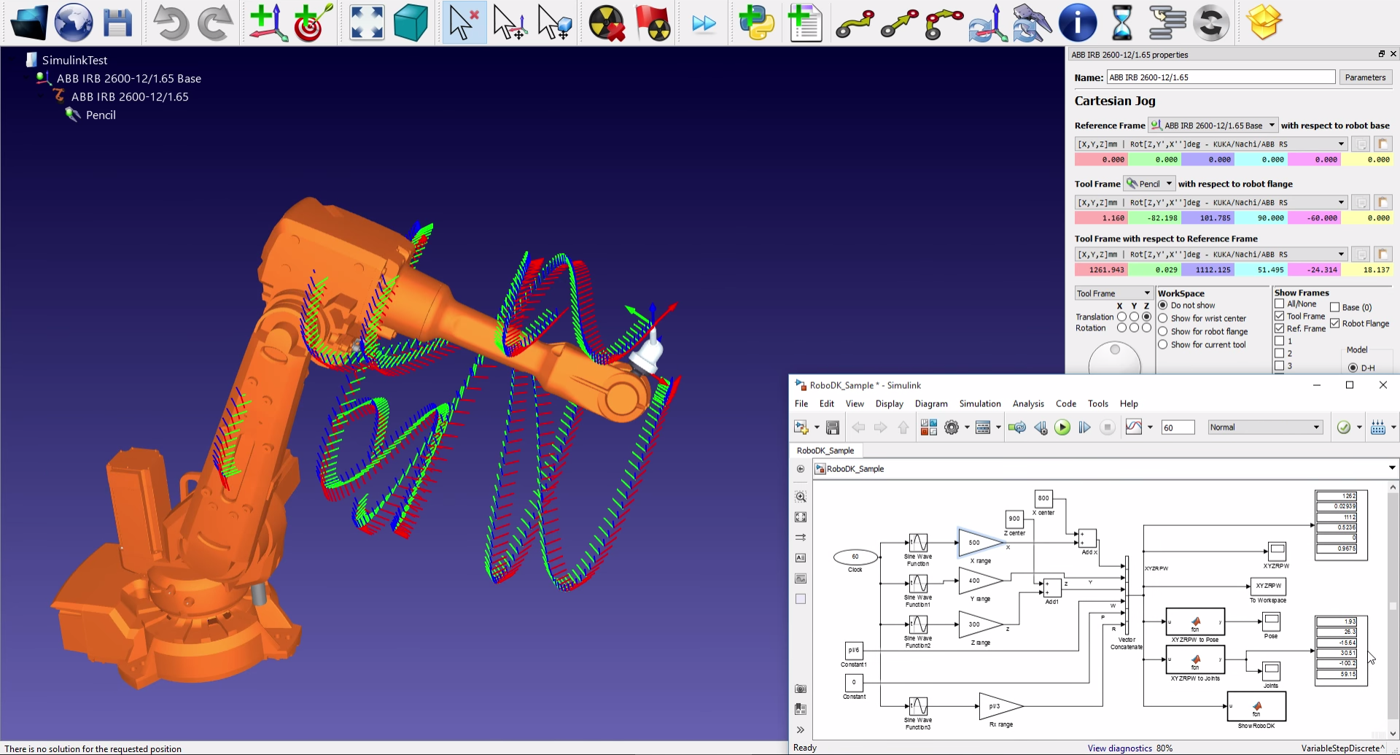
Exemplo do Simulink
Um projeto Simulink está disponível como exemplo. Na simulação, o robô é movido ao longo de um conjunto de coordenadas XYZ geradas arbitrariamente.
https://www.youtube.com/watch?v=7DDBMwa0-Oc