Python API
Python é uma linguagem de programação de alto nível amplamente usada para programação de uso geral. Python é uma linguagem de programação que permite que você trabalhe mais rápido e integre seus sistemas com mais eficiência. A sintaxe do Python permite que os programadores expressem conceitos em menos linhas de código em comparação com outras linguagens, o que a torna amigável e fácil de aprender.
A seção anterior explica as vantagens de usar a API do RoboDK com uma linguagem de programação amplamente usada para a programação de robôs, como o Python.
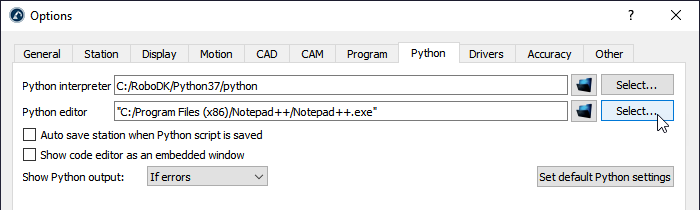
O Python é instalado automaticamente e integrado ao RoboDK por padrão. Selecione Ferramentas ➔ Opções ➔ Outros para alterar as configurações padrão (localização do Python e editor do Python).
A API do RoboDK para Python está dividida nos seguintes módulos:
●O pacote robodk é o ponto de entrada distribuído da API do Python. Ele é o pai comum de todos os sub pacotes e módulos.
●O submódulo robolink (robolink.py) é a interface entre o RoboDK e o Python. Qualquer objeto na árvore de estações do RoboDK pode ser recuperado usando um objeto Robolink e é representado pelo objeto Item. É possível realizar diferentes operações nesse item de acordo com a classe Robolink.Item.
●O submódulo robomath (robomath.py) é uma caixa de ferramentas de robótica para Python que permite operar com transformações de pose e obter ângulos de Euler para diferentes fornecedores de robôs. Todos os pós-processadores dependem desse módulo.
●O submódulo robodialogs (robodialogs.py) é uma caixa de ferramentas de diálogos. Por exemplo, diálogos para abrir e salvar arquivos, avisos de mensagens etc.
●O submódulo roboArquivoio (roboArquivoio.py) é uma caixa de ferramentas de operação de arquivos. Propriedades do arquivo, CSV, FTP, etc.
●O submódulo roboapps (roboapps.py) é uma caixa de ferramentas do RoboDK Apps. Mais informações sobre o Apps estão disponíveis aqui: AppLoader.
Você pode encontrar os módulos Python na pasta C:/RoboDK/Python/. Essa pasta é automaticamente incluída por padrão (usada como PYTHONPATH) quando você executa programas Python e pós-processadores no RoboDK.
As seções a seguir mostram como criar um programa simples para simulação, programação off-line e programação on-line, respectivamente. Mais exemplos estão disponíveis na página Python API for RoboDK. Além disso, a biblioteca do RoboDK vem com exemplos de scripts Python na pasta Scripts and Macros, disponível na biblioteca padrão (C:/RoboDK/Library/).
Simulação Python
Este exemplo mostra como criar uma nova estação usando um robô UR e simular um movimento hexagonal com o robô.
1.Selecione Arquivo ➔
2.Abra o robô UR10
3.Selecione Arquivo ➔
4.Abra o arquivo Paint_gun.tool
5.Abra o programa Python de exemplo SampleOfflineProgramming.py em C:/RoboDK/Library/Macros/

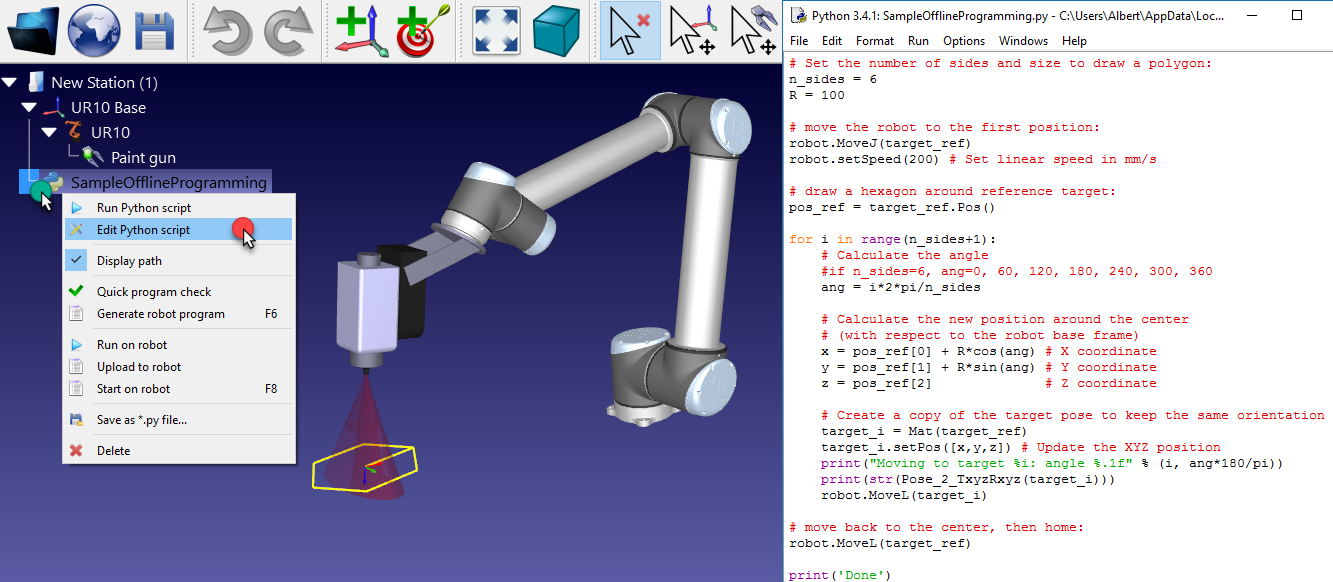
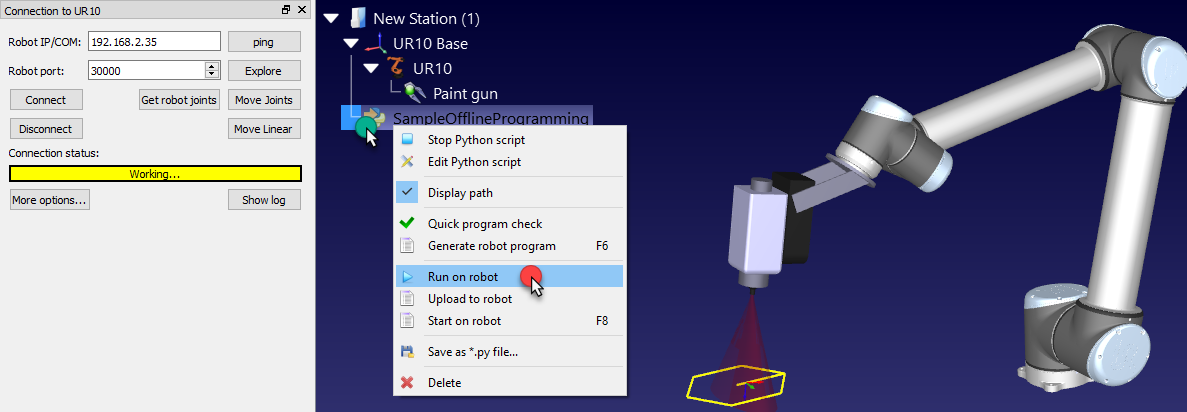
6.Clique duas vezes no item SampleOfflineProgramming para executar a simulação. O robô deve desenhar um hexágono em torno da localização atual do robô e o rastro do TCP será exibido em amarelo.
Como alternativa, clique com o botão direito do mouse no programa e selecione
7.Clique com o botão direito do mouse no item
A macro SampleOfflineProgramming desenhará um polígono de lado n_sides e raio R no local atual do robô, com relação ao frame de referência do robô. Se desejar, mova o robô para um local diferente, alterando as dimensões do polígono e execute o programa novamente.
Esse exemplo é semelhante ao programa exibido na seção de programação off-line do site (vídeo incluído).
Python OLP
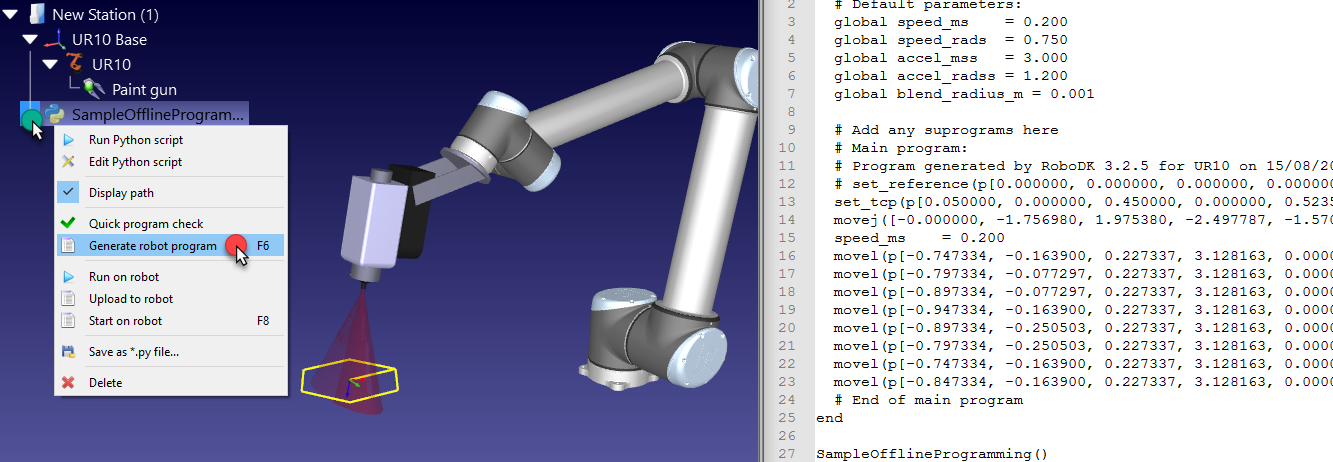
Os programas Python podem ser gerados off-line usando o mesmo código Python usado para simular o robô (conforme mostrado na seção anterior Simulação Python). A programação off-line permite gerar programas de robô que podem ser executados em um controlador de robô específico:
1.Clique com o botão direito do mouse em um programa
2.Selecione Gerar programa do robô (F6)
Nesse caso, o programa não é simulado, mas executado rapidamente para obter o resultado: um programa de robô específico para um controlador de robô.
RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)
Programação on-line em Python
Os programas Python podem ser executados diretamente no robô usando o mesmo código Python usado para simular o robô (conforme mostrado na seção Simulação Python). A programação on-line permite executar um programa genérico em um controlador de robô específico usando os Drivers de Robô:
1.Clique com o botão direito do mouse em um programa
2.Selecione Executar no robô
O programa será executado no robô à medida que o programa Python for executado.
RDK = Robolink()
RDK.setRunMode(RUNMODE_EXECUTAR_ROBOT)
Solução de problemas de configuração do Python no RoboDK
Se você instalou o RoboDK depois de instalar o Python, o RoboDK pode não conseguir executar corretamente os scripts Python ou gerar programas. Esta seção mostra as etapas que você deve seguir para configurar corretamente o interpretador Python no RoboDK e executar scripts Python sem problemas.
Você deve seguir estas etapas se vir uma mensagem de erro como: "Defina o caminho para o interpretador Python em Ferramentas – Opções - Python" ou "Falha ao executar o script Python. Defina o caminho para o interpretador Python em: Guia Ferramentas – Opções - Python".
Siga estas etapas para configurar corretamente o caminho do interpretador Python se você já tiver o Python instalado:
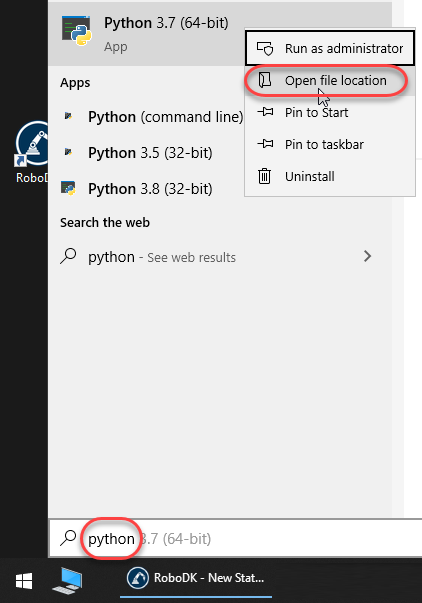
1.Selecione o menu Iniciar no Windows e digite python.
2.Clique com o botão direito do mouse na versão do Python que você gostaria de usar com o RoboDK e selecione Abrir local do arquivo.
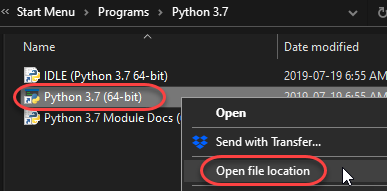
Repita esse procedimento na pasta que for aberta:
3.Clique com o botão direito do mouse em Python 3.7 e selecione Abrir local do arquivo.
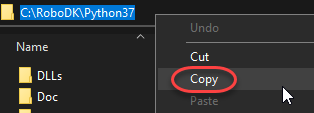
4.Selecione Copiar no caminho na barra de título do caminho.
Forneça o caminho do Python nas configurações do RoboDK:
5.Abra o RoboDK.
6.Selecione Ferramentas-Opções.
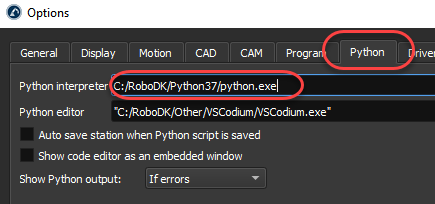
7.Selecione a guia Python.
8.Cole o caminho na caixa do interpretador Python adicionando /python.exe, conforme mostrado na próxima imagem. O uso de barras ou barras invertidas deve funcionar.