Simulação Python
Este exemplo mostra como criar uma nova estação usando um robô UR e simular um movimento hexagonal com o robô.
1.Selecione Arquivo ➔
2.Abra o robô UR10
3.Selecione Arquivo ➔
4.Abra o arquivo Paint_gun.tool
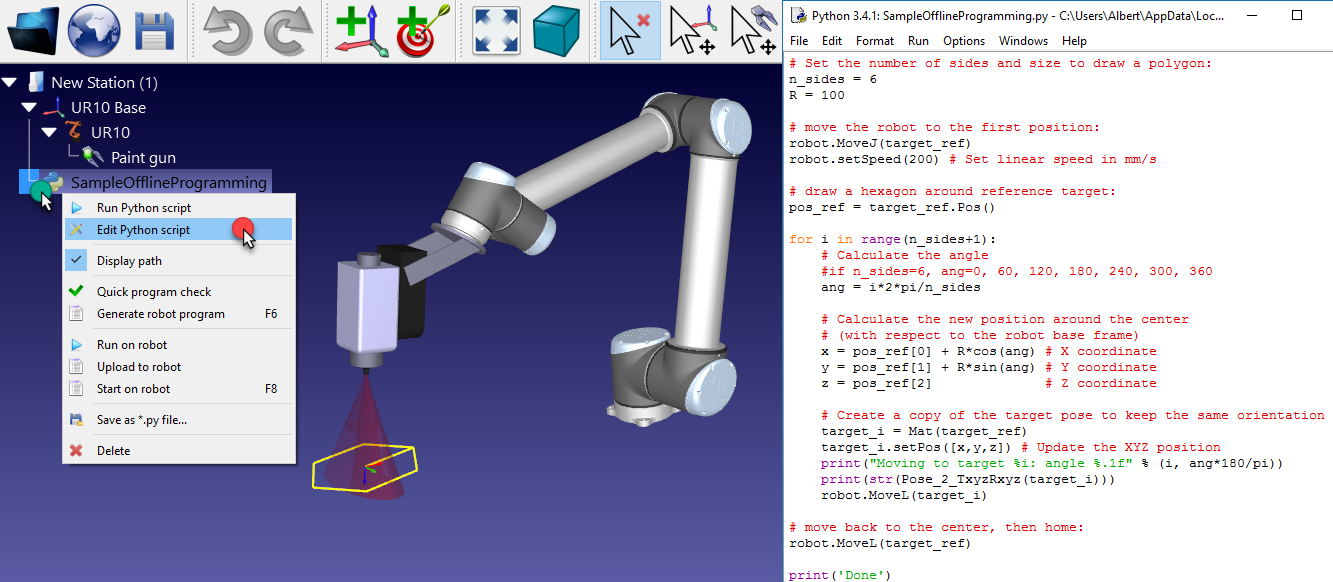
5.Abra o programa Python de exemplo SampleOfflineProgramming.py em C:/RoboDK/Library/Macros/

6.Clique duas vezes no item SampleOfflineProgramming para executar a simulação. O robô deve desenhar um hexágono em torno da localização atual do robô e o rastro do TCP será exibido em amarelo.
Como alternativa, clique com o botão direito do mouse no programa e selecione
7.Clique com o botão direito do mouse no item
A macro SampleOfflineProgramming desenhará um polígono de lado n_sides e raio R no local atual do robô, com relação ao frame de referência do robô. Se desejar, mova o robô para um local diferente, alterando as dimensões do polígono e execute o programa novamente.
Esse exemplo é semelhante ao programa exibido na seção de programação off-line do site (vídeo incluído).