Interface do usuário do RoboDK CNC
O RoboDK CNC permite alimentar programas grandes em um controlador de robô.
A janela principal do RoboDK CNC contém os seguintes elementos:
1.Menu principal
2.Barra de ferramentas
3.Tabela de instruções
4.Painel de status

As operações do Menu Principal e da Barra de Ferramentas se sobrepõem.
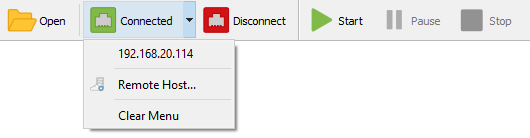
| Abrir | Abra um arquivo CSV gerado usando o e o pós-processador CNC RoboDK . |
| Conectar | Esse ícone indica que não há conexão com o sistema de controle do robô no momento. Ao pressionar esse botão, o menu do histórico de conexões será aberto. |
| Host remoto... | Essa ação abrirá a caixa de diálogo Nova conexão para se conectar ao endereço IP e à porta do sistema de controle remoto do robô. |
| Conexão | Esse ícone indica uma tentativa de conexão com o sistema de controle do robô. |
| Conectado | Esse ícone indica uma conexão bem-sucedida com o sistema de controle do robô. |
| Desconectar | Essa ação interrompe imediatamente a conexão com o sistema de controle do robô. Tenha cuidado, pois o robô pode continuar a se mover mesmo depois que o RoboDK CNC for desconectado. |
| Início | Comece a executar os movimentos do robô logo na primeira instrução. Ou continue executando um programa iniciado anteriormente. |
| Pausa | Suspender a execução de um programa iniciado anteriormente. |
| Parar | Cancelar a execução do programa e interromper os movimentos do robô. |









O Painel de status contém informações sobre o programa KRL em execução no momento, indicadores de prontidão e de substituição de velocidade e informações sobre a posição atual do robô.
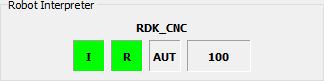
O painel do Interpretador do Robô contém quatro indicadores:
Acionamentos e movimentos de robôs |
| Os acionamentos do robô são ligados e o robô está pronto para fazer movimentos. |
| Os atuadores do robô estão desligados e o robô não está pronto para a operação. | |
Status do programa KRL |
| O programa do robô não está carregado. |
| O programa do robô é carregado e está pronto para ser executado. | |
| O programa do robô está sendo executado. | |
| O programa do robô foi interrompido devido a um erro. | |
| O programa do robô foi totalmente executado. | |
Modo do controlador do robô |
| O modo de operação atual do sistema de controle do robô. Pode assumir os seguintes valores: T1, T2, AUT, EXT. |
Substituição de velocidade |
| O valor de substituição da velocidade de execução do programa em porcentagem de 0 a 100. |








