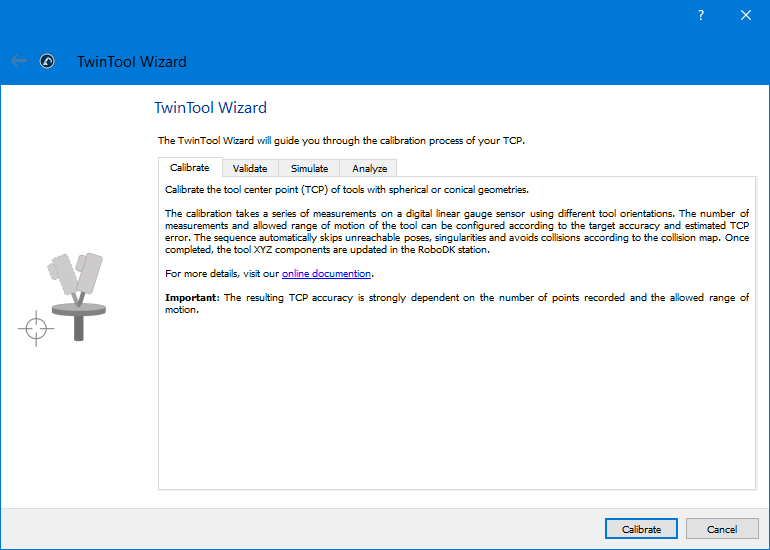
Assistente de Calibração
Para iniciar o procedimento de calibração, basta selecionar TwinTool ➔
Depois de iniciar o assistente, você será guiado pelas configurações


Importante: Recomenda-se executar a sequência de calibração no modo de simulação pelo menos uma vez antes de calibrar no robô conectado.
Importante: A sequência simulada pode não corresponder à sequência real usada para calibração ou validação. O caminho do robô é ajustado automaticamente.
Dica: Salve o ponto comum da posição do robô no sensor, usando um nome diferente de "Calib Target". Você pode reutilizá-lo para mover rapidamente o robô de volta à posição.
Dica: Defina o erro estimado da ferramenta como 5 mm ou menos se você já tiver uma boa estimativa de TCP. Isso tornará o procedimento de calibração mais rápido.
Dica: Altere a faixa de articulação em Z e XY para alterar a faixa de movimento do robô.