Para calibrar a ferramenta (TCP) usando o TwinTool, você precisa carregar o robô no RoboDK e certificar-se de que o sensor e o robô estejam conectados. Opcionalmente, você pode modelar a célula adicionando os modelos 3D de objetos e ferramentas. Isso permitirá que você evite colisões automaticamente.
1.Carregue o robô:
a.Selecione Arquivo ➔ Abrir biblioteca on-line. A biblioteca on-line será exibida no RoboDK.
b.Use os filtros para encontrar seu robô.
c.Selecione Abrir para carregar automaticamente o robô em sua estação RoboDK.
d.Como alternativa, faça o download do arquivo do robô diretamente da biblioteca (https://robodk.com/library) e abra o arquivo com o RoboDK (arquivo .robot).
2.Conecte o sensor:
a.Conecte o sensor ao seu computador.
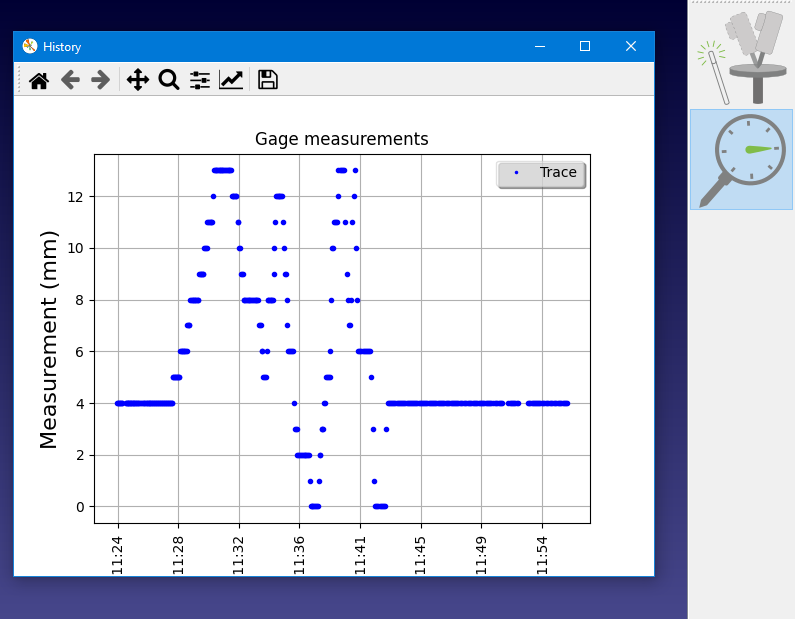
b.Selecione TwinTool ➔ Medição.
c.Verifique se o sensor está medindo e se as medições são estáveis.
Observação: Se não conseguir se conectar ao sensor imediatamente, você poderá editar as configurações de conexão e salvá-las para uso posterior durante as próximas etapas.
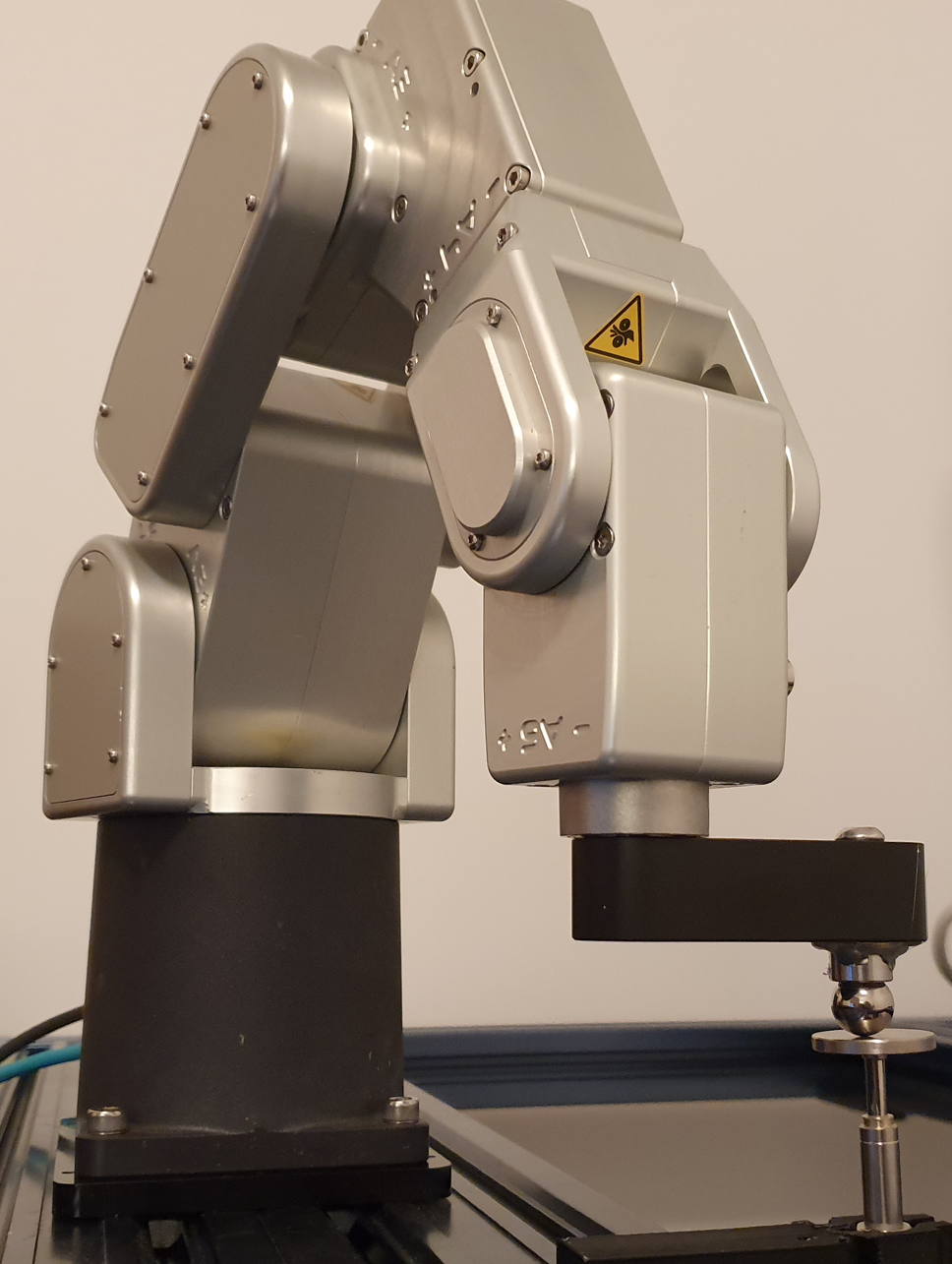
Importante: Certifique-se de que a configuração seja rígida o suficiente para a calibração, certificando-se de que as vibrações próximas não alterem as medições. Por exemplo, coloque o robô sobre o sensor e tente criar pequenas vibrações (como caminhar próximo à área do sensor). A medição deve permanecer estável com menos de 0,005 mm de ruído. Se esse não for o caso, é altamente recomendável reforçar o suporte do sensor e/ou a base do robô.
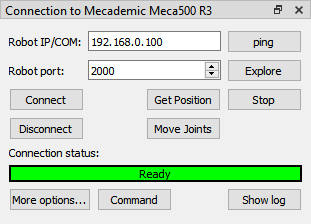
3.Conecte o robô:
a.Selecione Conectar➔ Conectar robô.
b.Digite o IP e a porta do robô.
c.Selecione Conectar.
Observação: Alguns controladores de robôs exigem uma configuração específica ou opções de software específicas. Mais informações na seção de controladores de robôs.
4.Selecione Obter posição no painel de conexão do robô. Esta etapa atualizará a posição do robô no RoboDK.
Configuração personalizada
Importante: É recomendado que você modele e carregue na célula os modelos 3D de todos os objetos que possam causar colisões com o robô ou a ferramenta. Se tiver uma ferramenta que possa causar colisões com o robô (ou qualquer outra colisão em potencial), é melhor proceder com uma configuração personalizada, conforme descrito na próxima seção.
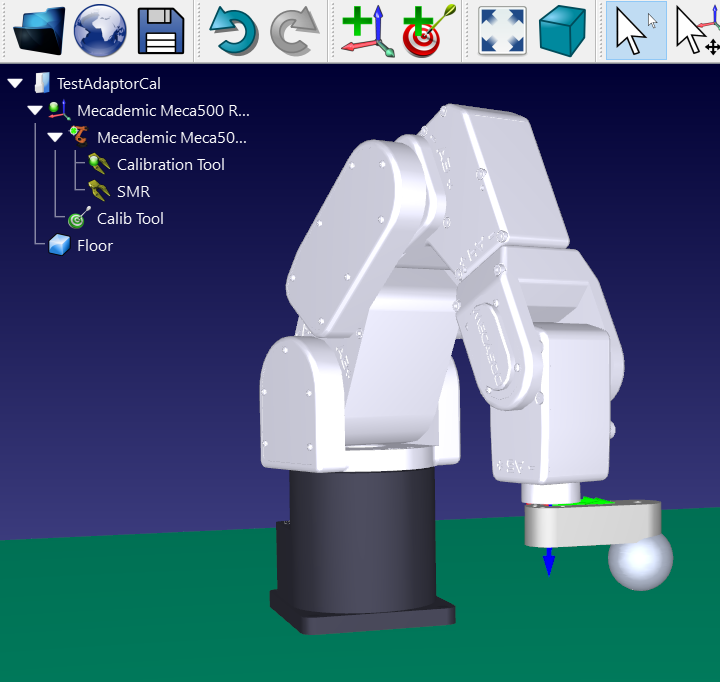
Opcionalmente, você pode seguir estas etapas para modelar adequadamente o ambiente 3D da sua célula.
1.Carregue o modelo 3D de sua ferramenta e crie uma ferramenta no RoboDK. Mais informações na seção de criação de ferramentas.
2.Carregue qualquer arquivo 3D para modelar a célula. Você pode carregar arquivos 3D STEP, IGES, STL. Mais informações na seção de introdução.
Observação: É altamente recomendável modelar adequadamente a célula para evitar colisões.
Dica: Se você tiver uma boa estimativa do ponto central da ferramenta, poderá configurá-la no RoboDK e atualizar a ferramenta estimada para ter um procedimento de calibração mais rápido.
Assistente de Calibração
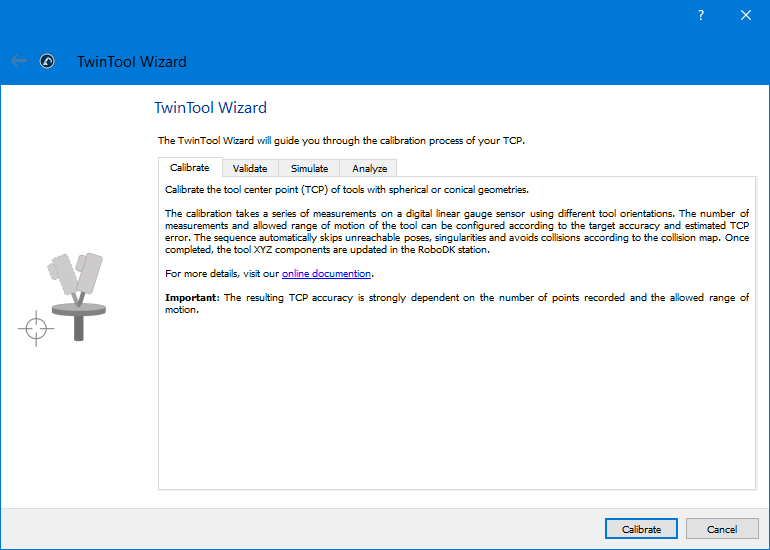
Para iniciar o procedimento de calibração, basta selecionar TwinTool ➔ Assistente do TwinTool
Depois de iniciar o assistente, você será guiado pelas configurações Calibração, Validação ou Simulação. Isso inclui a configuração da conexão com o sensor, a garantia de um estado válido do robô e a revisão dos principais parâmetros. Siga as etapas na tela e consulte as dicas da ferramenta se precisar de detalhes adicionais.
Importante: Recomenda-se executar a sequência de calibração no modo de simulação pelo menos uma vez antes de calibrar no robô conectado.
Importante: A sequência simulada pode não corresponder à sequência real usada para calibração ou validação. O caminho do robô é ajustado automaticamente.
Dica: Salve o ponto comum da posição do robô no sensor, usando um nome diferente de "Calib Target". Você pode reutilizá-lo para mover rapidamente o robô de volta à posição.
Dica: Defina o erro estimado da ferramenta como 5 mm ou menos se você já tiver uma boa estimativa de TCP. Isso tornará o procedimento de calibração mais rápido.
Dica: Altere a faixa de articulação em Z e XY para alterar a faixa de movimento do robô.