Configuração personalizada
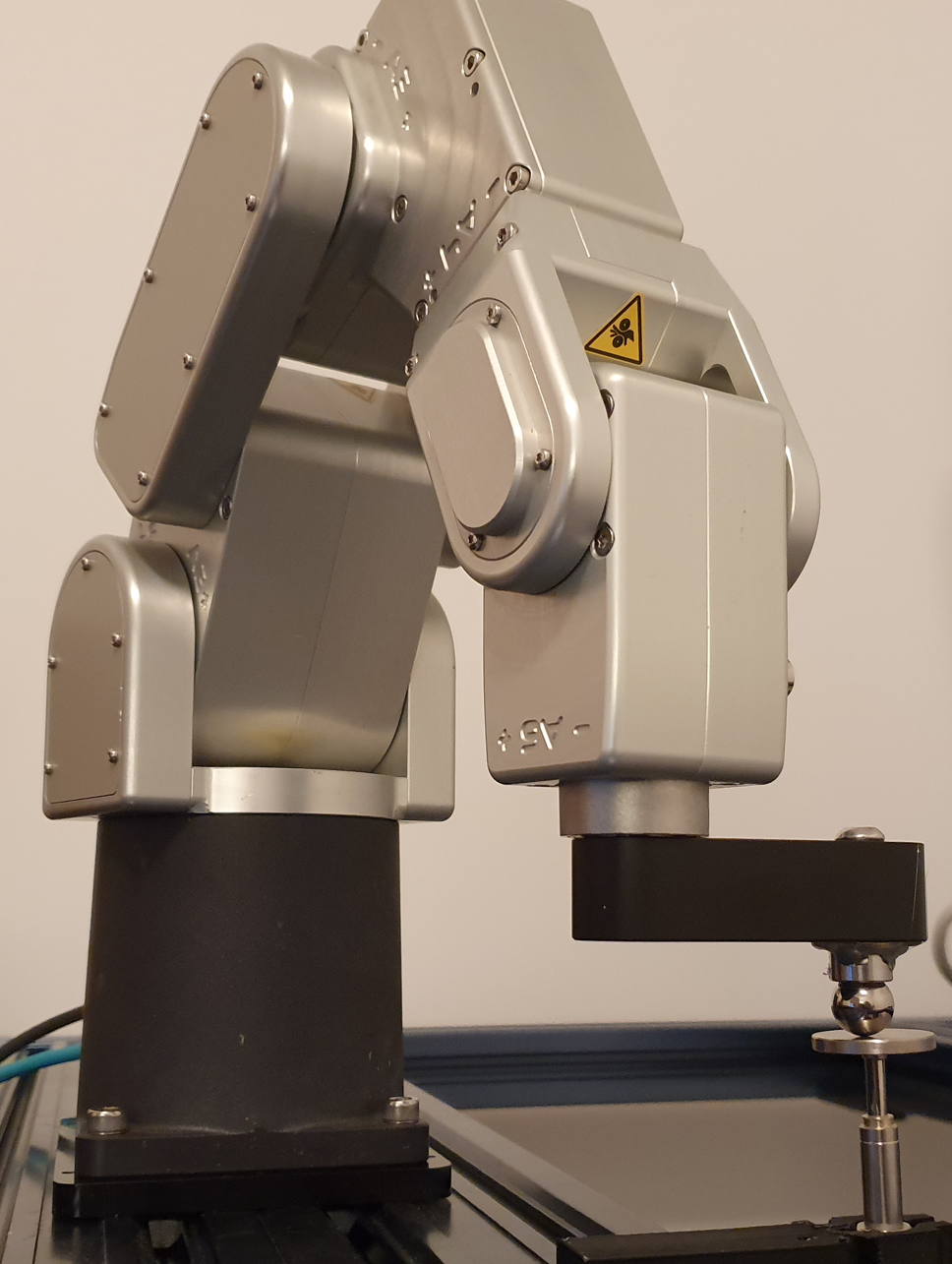
Importante: É recomendado que você modele e carregue na célula os modelos 3D de todos os objetos que possam causar colisões com o robô ou a ferramenta. Se tiver uma ferramenta que possa causar colisões com o robô (ou qualquer outra colisão em potencial), é melhor proceder com uma configuração personalizada, conforme descrito na próxima seção.
Opcionalmente, você pode seguir estas etapas para modelar adequadamente o ambiente 3D da sua célula.
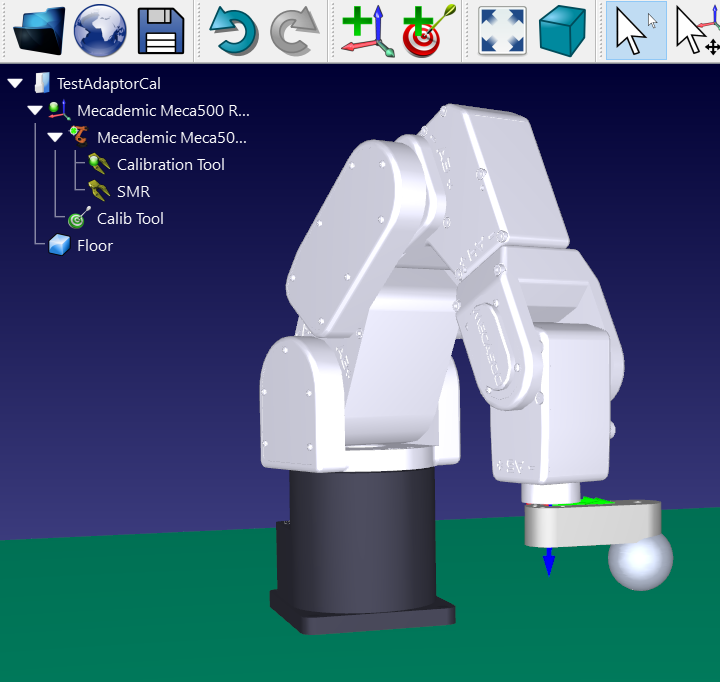
1.Carregue o modelo 3D de sua ferramenta e crie uma ferramenta no RoboDK. Mais informações na seção de criação de ferramentas.
2.Carregue qualquer arquivo 3D para modelar a célula. Você pode carregar arquivos 3D STEP, IGES, STL. Mais informações na seção de introdução.
Observação: É altamente recomendável modelar adequadamente a célula para evitar colisões.
Dica: Se você tiver uma boa estimativa do ponto central da ferramenta, poderá configurá-la no RoboDK e atualizar a ferramenta estimada para ter um procedimento de calibração mais rápido.