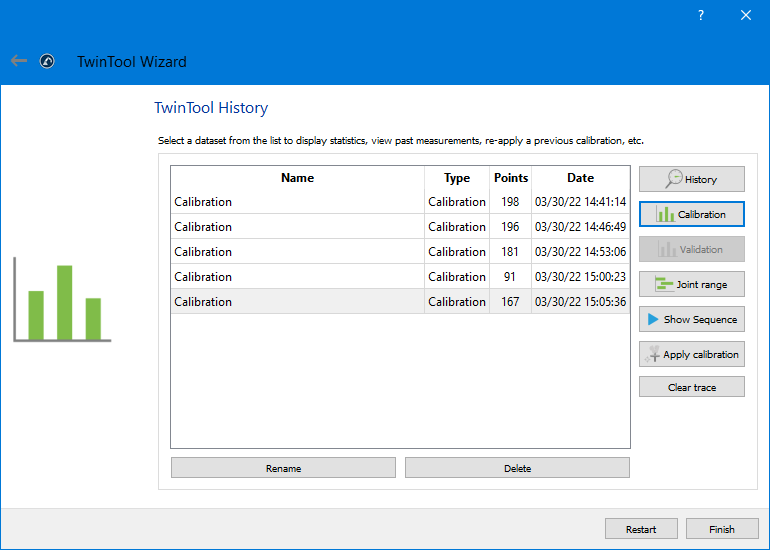
Após a conclusão da sequência de calibração, você será direcionado para a guia Análise do assistente. A partir daí, você pode visualizar as calibrações e validações atuais e anteriores, excluir ou reaplicar calibrações e muito mais.
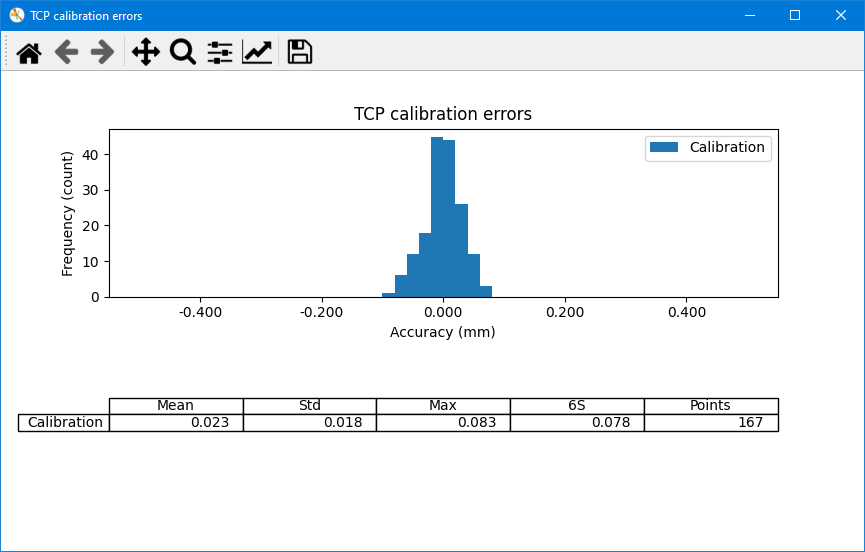
Ao clicar no botão Calibração, você verá um gráfico que mostra os resultados da calibração. O ponto central da ferramenta (TCP) é calculado usando a cinemática nominal do robô.
Observação: Selecione TwinTool➔ Assistente do TwinTool para iniciar a sequência de calibração novamente com um conjunto diferente de pontos (o sensor não deve ser movido).
Dica: Se você quiser obter os melhores resultados de precisão, é importante calibrar a ferramenta com diferentes configurações de robô. Por exemplo, se você executar primeiro uma sequência de calibração com o robô na posição flip (eixo 5 negativo), poderá ensinar um novo ponto com uma posição não flip (eixo 5 positivo) e executar a sequência de calibração novamente.