RoboDK TwinTool
Introdução
Com a calibração do RoboDK TwinTool, você pode calibrar automaticamente o ponto central da ferramenta (TCP). Os robôs industriais tem alta repetibilidade, mas não são precisos. Portanto, a precisão de um robô industrial pode ser melhorada por meio da calibração do robô e da ferramenta. Sem a calibração, a precisão do robô depende muito da marca e do modelo do robô.

O RoboDK TwinTool pode ser usado para calibrar e validar o ponto central da ferramenta (TCP). O TwinTool pode calibrar com precisão o TCP para ferramentas com geometrias esféricas ou cônicas.
1.Ferramentas esféricas➔ O centro da ferramenta é calibrado
2.Ferramentas cônicas➔ A ponta da ferramenta é calibrada
Requisitos
Você deve instalar o RoboDK TwinTool App e ter um sensor compatível para realizar a calibração automática da ferramenta.
Certifique-se de ter os seguintes itens:
1.Um ou mais braços de robô.
2.Um relógio comparador compatível (também conhecido como LVDT ou medidor linear).
3.O software RoboDK deve ser instalado e uma licença apropriada para a calibração automatizada do robô deve estar disponível.
4.Você precisa de drivers de robô compatíveis com o controlador do robô.
5.Instale o aplicativo RoboDK TwinTool:
a.Faça o download do RoboDK TwinTool App (entre em contato com a RoboDK para obter o link de download)
b.Clique duas vezes no arquivo para instalar o aplicativo e abri-lo no RoboDK.
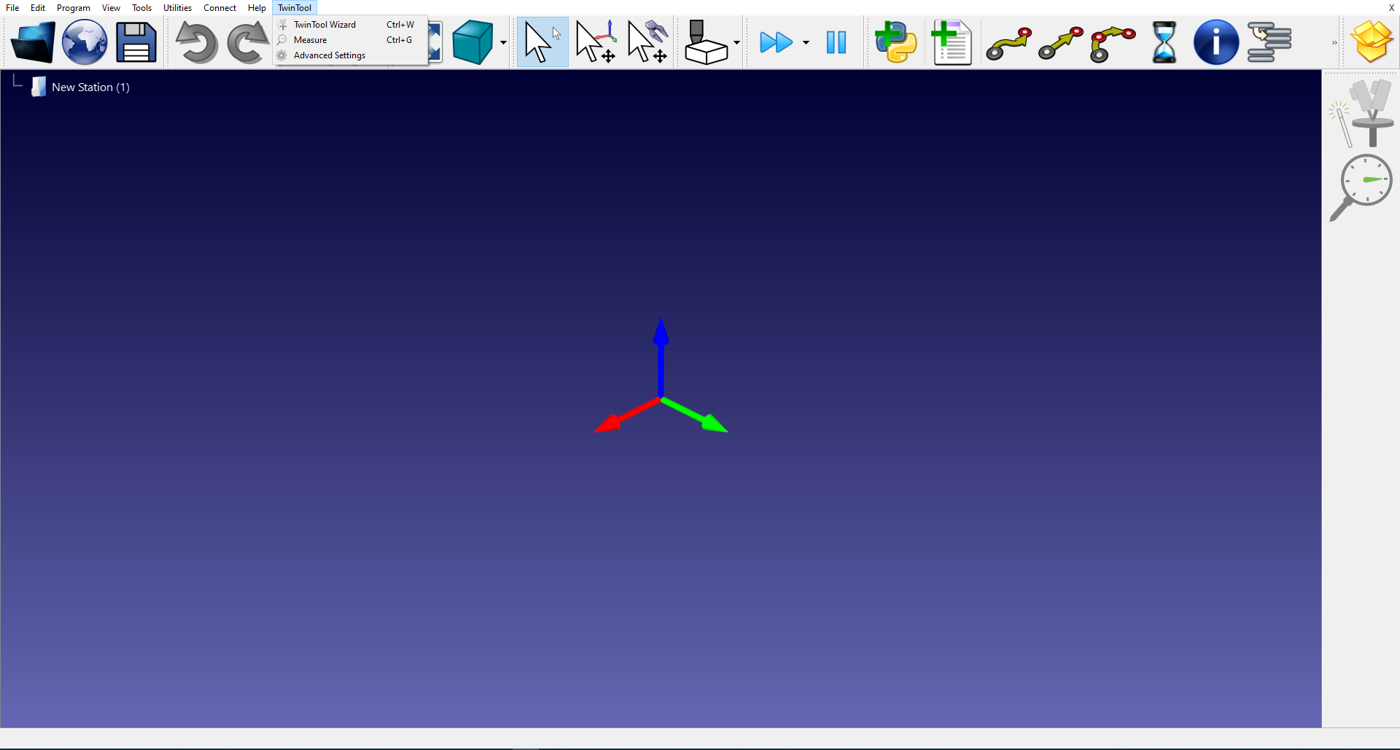
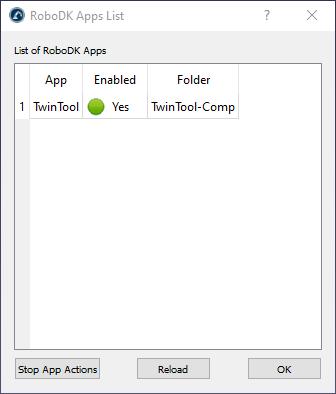
c.Selecione Ferramentas ➔ Aplicativos e clique duas vezes no TwinTool para ver a barra de ferramentas e o menu do TwinTool
Se não conseguir ver o aplicativo TwinTool, você deve fechar o RoboDK e iniciá-lo novamente com privilégios de administrador para instalar corretamente o aplicativo.
Sensor de medição linear
O RoboDK TwinTool é compatível com vários sensores de medição linear, incluindo Keyence, Mitutoyo, Sylvac e outros. Alguns protocolos de comunicação incluem USB, Internet/IP e RS232. O preço aproximado de um sensor de medição linear de nível industrial é de 1.500,00 euros.
O sensor de medição linear deve ter uma precisão de 0,005 mm ou melhor e um curso de 10 mm ou mais. É recomendável ter uma frequência de medição de 50 amostras por segundo ou mais. Esse sensor não é fornecido ou vendido pela RoboDK. Recomendamos que entre em contato com o seu distribuidor local para obter o sensor necessário para usar o RoboDK TwinTool.
A lista a seguir mostra um exemplo de pedido de um medidor linear Keyence:
●Keyence GT2-P12 - Medidor tipo lápis
●GT2-UB1 - Unidade de conexão USB
●OP-87716 - Extensão de cabo
●OP-76875 - Sugestão de suporte de montagem para o medidor
●É necessário um ponto de contato plano de 25 mm com rosca M2.5x0.25 (não fornecido pela Keyence)
A lista a seguir mostra um exemplo de pedido de um medidor linear Mitutoyo:
●Mitutoyo 542-191 - LG 100 gage
●Mitutoyo 542-081A - Contador EJ + AC
●Mitutoyo 21HZA149 - Interface USB (RS232 também suportado)
●É necessário um ponto de contato plano de 25 mm com rosca M2,5x0,25 (não fornecido pela Mitutoyo)
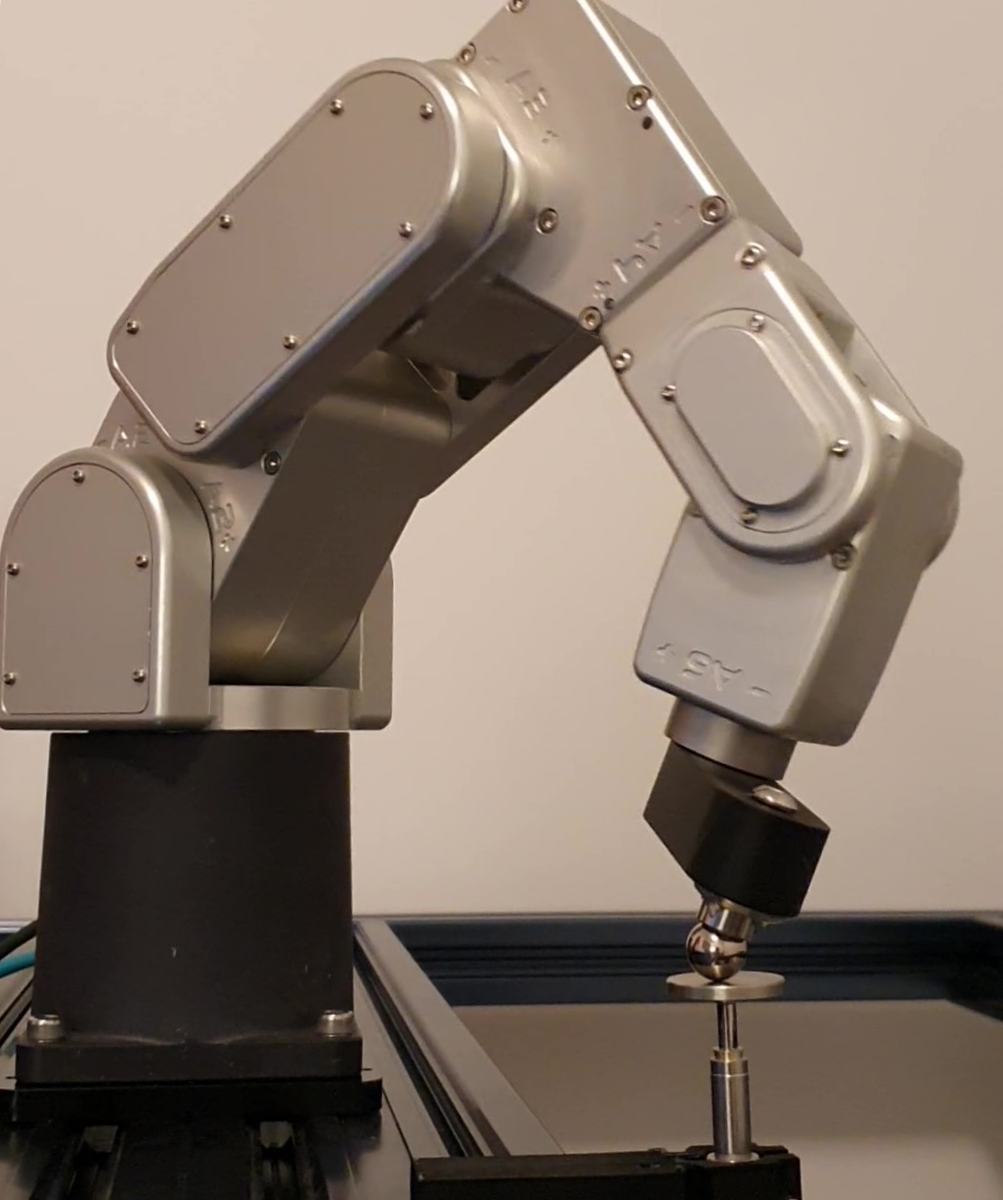
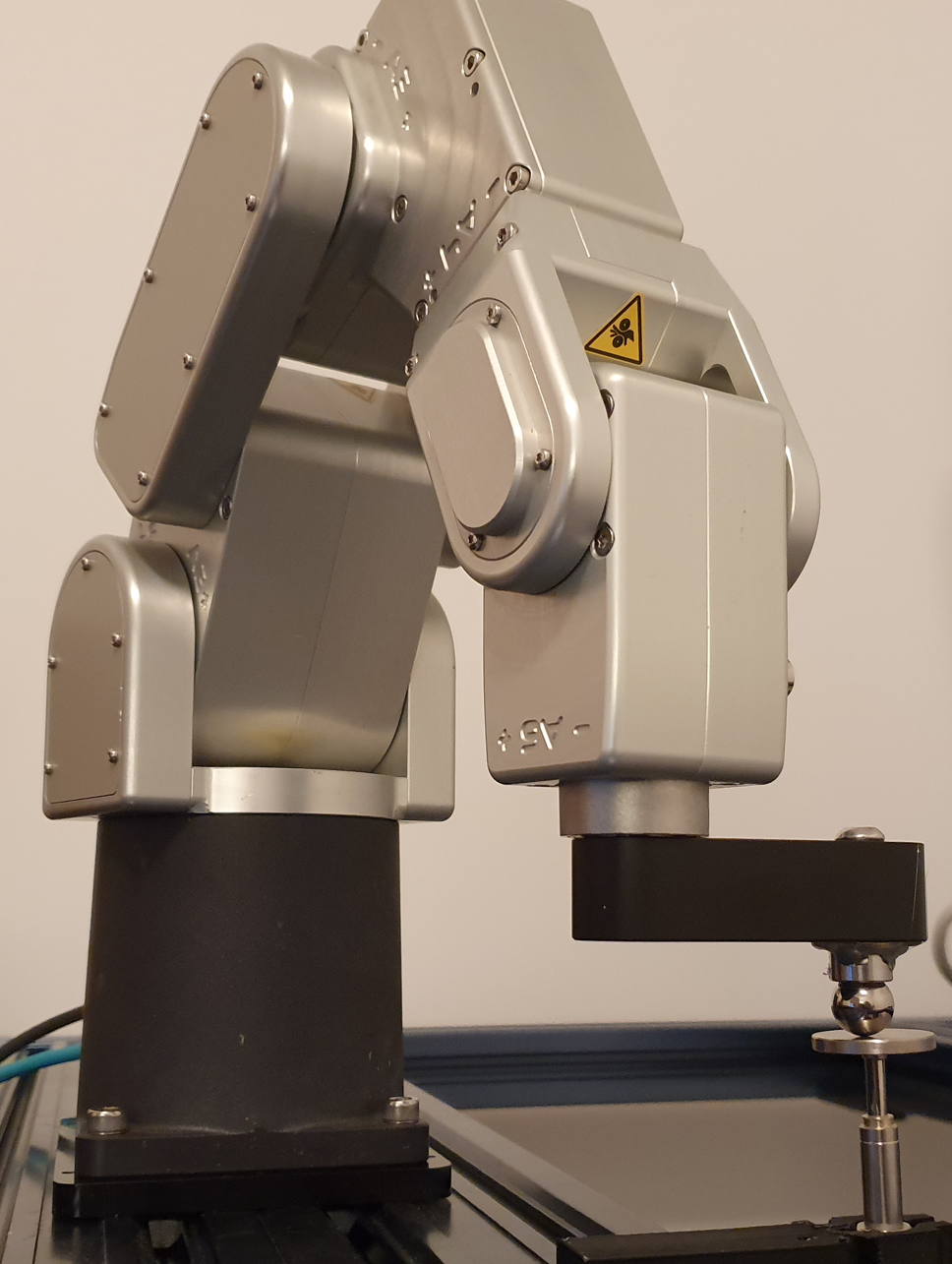
Configuração da calibração
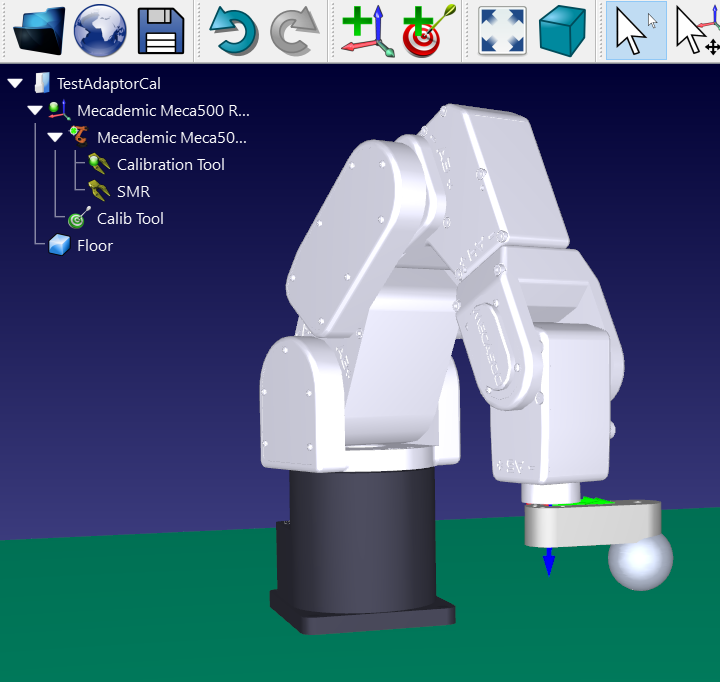
Para calibrar a ferramenta (TCP) usando o TwinTool, você precisa carregar o robô no RoboDK e certificar-se de que o sensor e o robô estejam conectados. Opcionalmente, você pode modelar a célula adicionando os modelos 3D de objetos e ferramentas. Isso permitirá que você evite colisões automaticamente.
1.Carregue o robô:
a.Selecione Arquivo ➔ Abrir biblioteca on-line. A biblioteca on-line será exibida no RoboDK.
b.Use os filtros para encontrar seu robô.
c.Selecione Abrir para carregar automaticamente o robô em sua estação RoboDK.
d.Como alternativa, faça o download do arquivo do robô diretamente da biblioteca (https://robodk.com/library) e abra o arquivo com o RoboDK (arquivo .robot).
2.Conecte o sensor:
a.Conecte o sensor ao seu computador.
b.Selecione TwinTool ➔
c.Verifique se o sensor está medindo e se as medições são estáveis.
3.Conecte o robô:
a.Selecione Conectar➔ Conectar robô.
b.Digite o IP e a porta do robô.
c.Selecione Conectar.
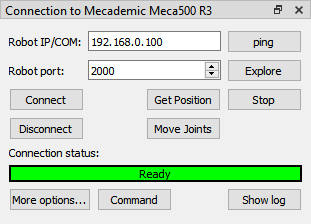
4.Selecione Obter posição no painel de conexão do robô. Esta etapa atualizará a posição do robô no RoboDK.
Configuração personalizada
Opcionalmente, você pode seguir estas etapas para modelar adequadamente o ambiente 3D da sua célula.
1.Carregue o modelo 3D de sua ferramenta e crie uma ferramenta no RoboDK. Mais informações na seção de criação de ferramentas.
2.Carregue qualquer arquivo 3D para modelar a célula. Você pode carregar arquivos 3D STEP, IGES, STL. Mais informações na seção de introdução.
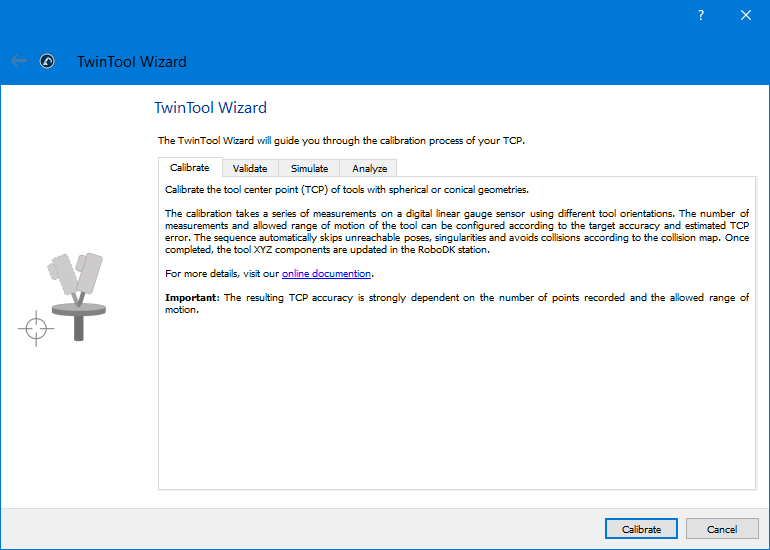
Assistente de Calibração
Para iniciar o procedimento de calibração, basta selecionar TwinTool ➔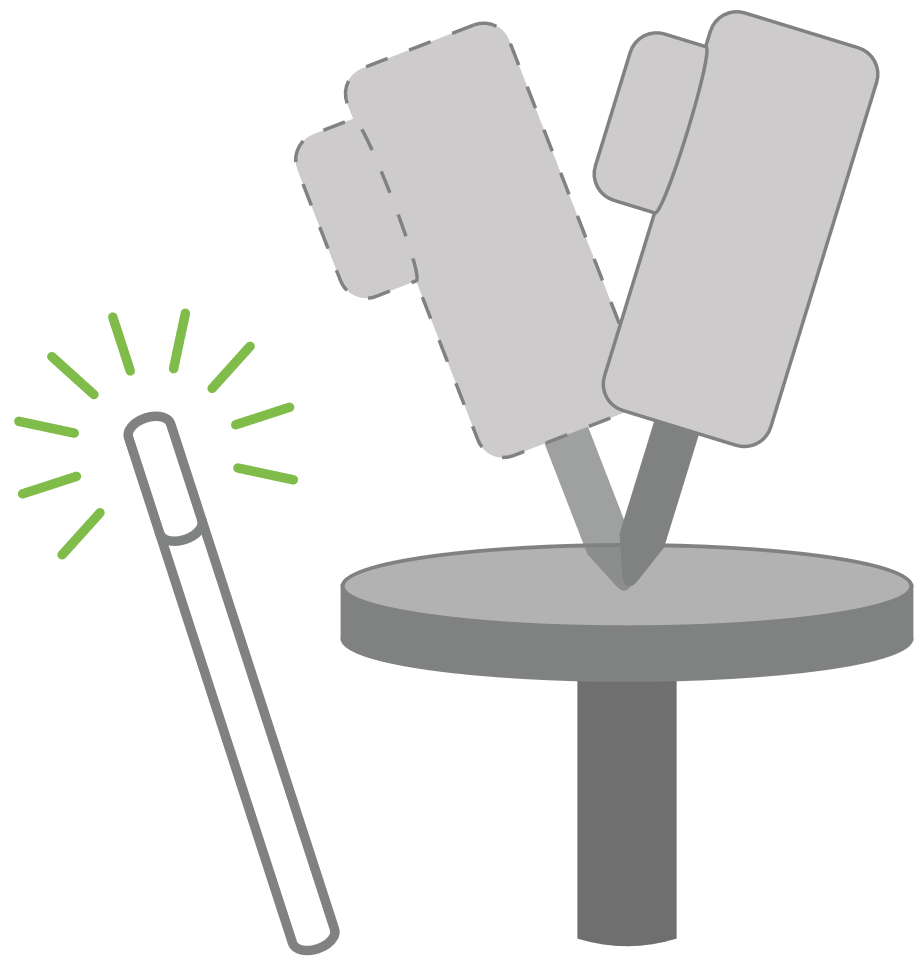
Depois de iniciar o assistente, você será guiado pelas configurações


Resultados da calibração
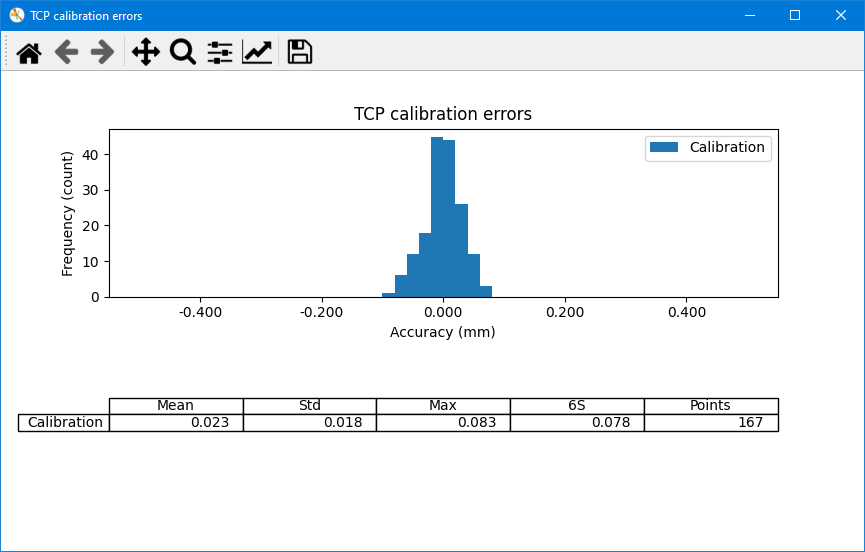
Após a conclusão da sequência de calibração, você será direcionado para a guia
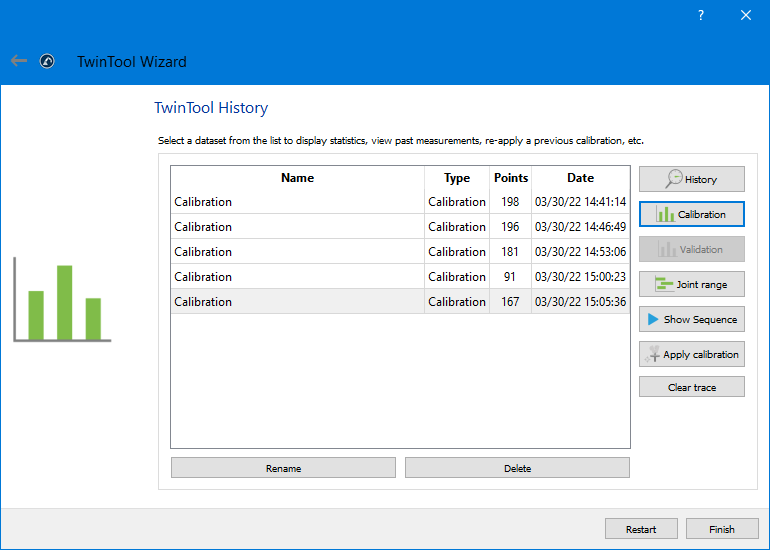
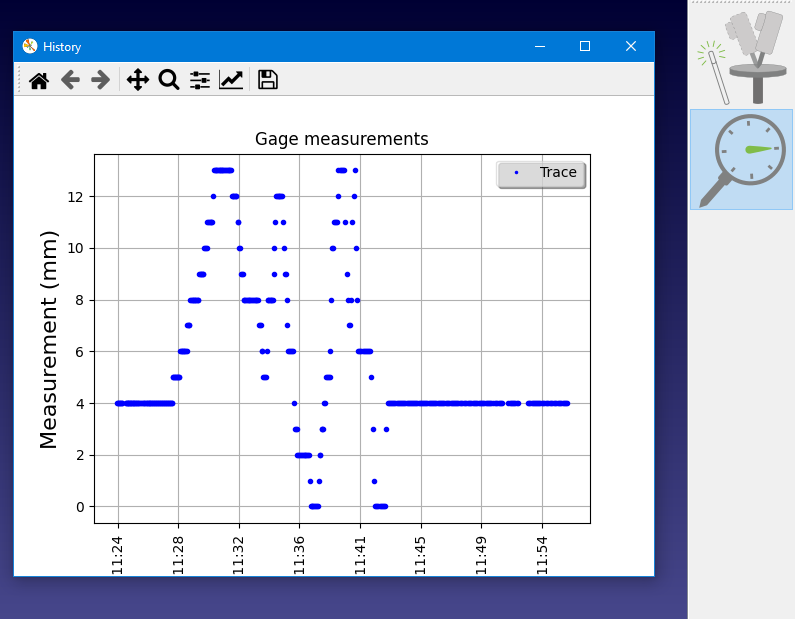
Ao clicar no botão Calibração, você verá um gráfico que mostra os resultados da calibração. O ponto central da ferramenta (TCP) é calculado usando a cinemática nominal do robô.
Validação
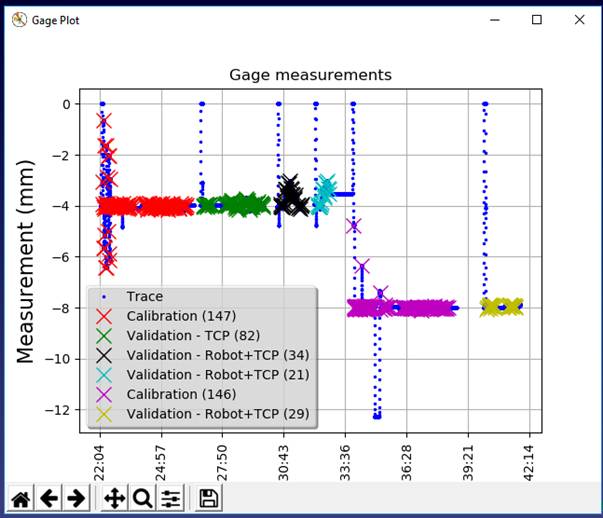
Depois de executar a sequência de calibração, você pode executar alguns testes de validação. Esses testes de validação podem ser feitos no mesmo local do sensor ou em locais diferentes.
Validar a calibração da ferramenta
Selecione
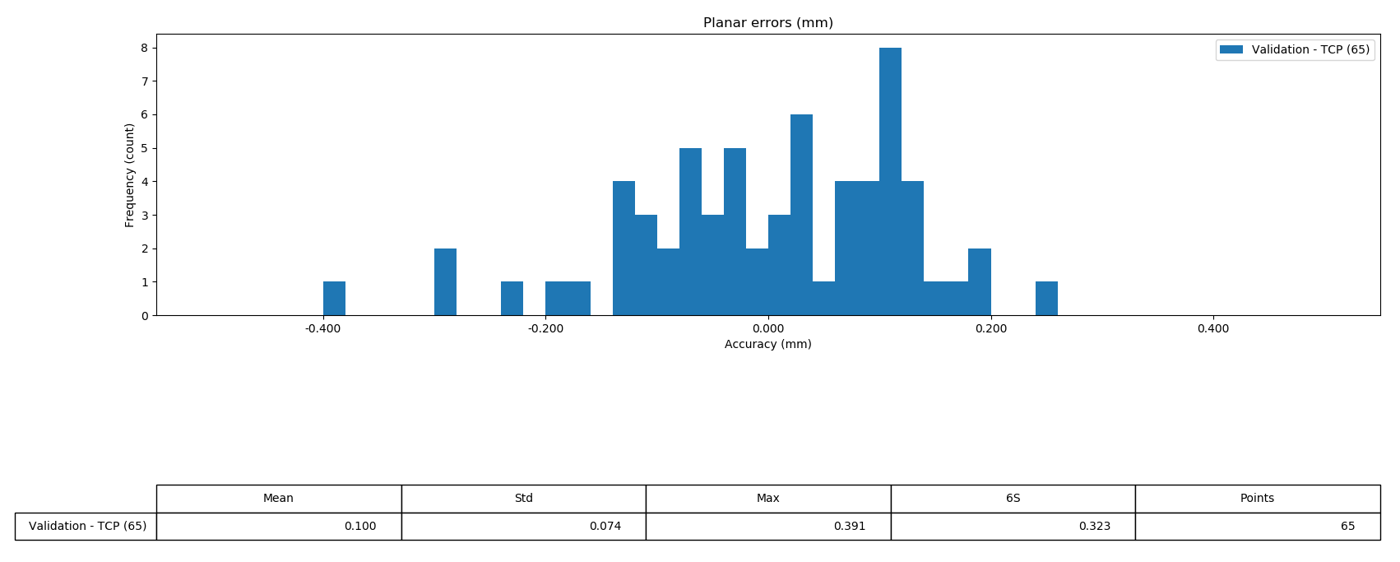
Selecione Validação para exibir um resumo e algumas estatísticas sobre os resultados. Essas estatísticas correspondem aos erros planares detectados pelo sensor.
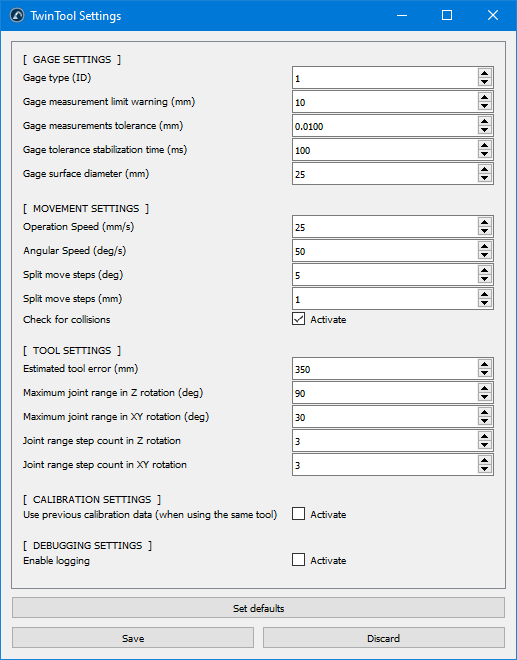
Configurações
Esta seção descreve configurações e opções adicionais que podem ser modificadas para personalizar melhor as calibrações e testar a precisão do robô.
Configurações de calibração
Selecione TwinTool ➔ Configurações avançadas para abrir a lista completa de configurações avançadas. A maioria dessas configurações é solicitada e definida por meio do Assistente.