Anexo I - Masterização para os eixos 1 e 6
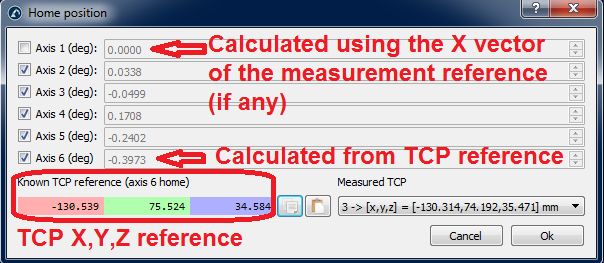
Você deve prestar atenção especial se quiser recuperar os valores de masterização/home para os eixos 1 e 6. Esses valores estão diretamente relacionados ao frame de base do robô para o eixo 1 e a uma referência TCP para o eixo 6. Portanto, devem ser feitas medições externas para definir corretamente esses valores. Essa janela aparece depois que você seleciona "Criar programa de masterização" no menu de calibração.
Os próximos dois procedimentos devem ser seguidos para definir corretamente os parâmetros de masterização para esses dois eixos.
Referência do eixo 6
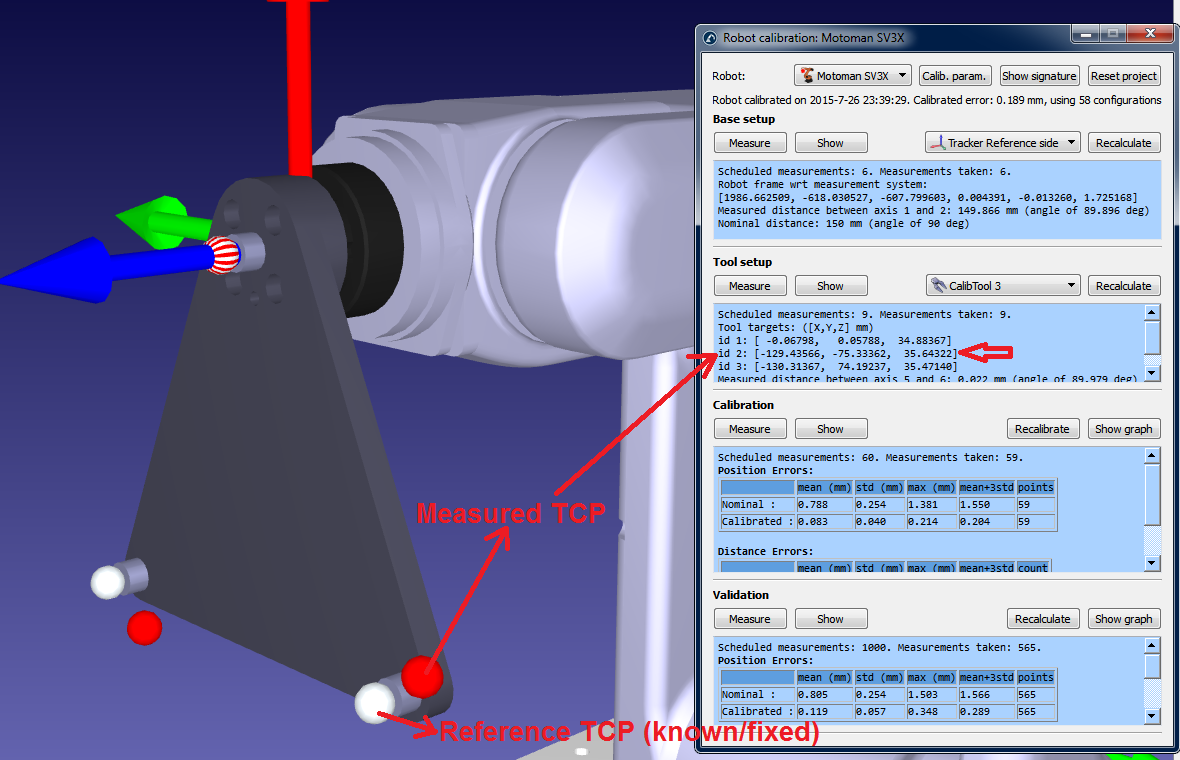
Você deve usar um ponto de referência para definir corretamente a posição "inicial" do eixo 6. O desvio de ângulo será a rotação em torno do eixo Z do flange da ferramenta necessária para melhor ajustar o TCP medido (X,Y,Z) com a referência TCP conhecida. O TCP medido (veja a imagem a seguir) é um dos TCPs que foram medidos na etapa dois do procedimento de calibração. O TCP de referência é uma referência conhecida que corresponde a um dos TCP da ferramenta de calibração que está sendo usada.
Idealmente, o TCP de referência deve ser medido pela CMM em relação ao flange da ferramenta (uma réplica do flange da ferramenta do robô seria melhor). Como alternativa, você pode usar um novo robô para medir (etapa dois do procedimento de calibração) o TCP pela primeira vez e usar um TCP medido como referência. É importante usar um pino de cavilha e/ou a referência apropriada do flange da ferramenta para garantir que o efetor final seja sempre colocado na mesma posição.
Referência do eixo 1
Você deve medir corretamente três pontos de base antes de iniciar a calibração do robô se quiser alinhar o eixo 1 com a frame de base real do robô. Esses pontos de base devem ser escolhidos de modo que o frame de referência possa ser encontrado em relação ao robô.
A posição "inicial" do eixo 1 depende diretamente dos três pontos da base, bem como da configuração da base do robô. A configuração da base do robô é a primeira etapa de calibração, na qual a frame de base do sistema de medição é posicionada em relação à frame de base do robô, movendo e medindo os eixos 1 e 2.
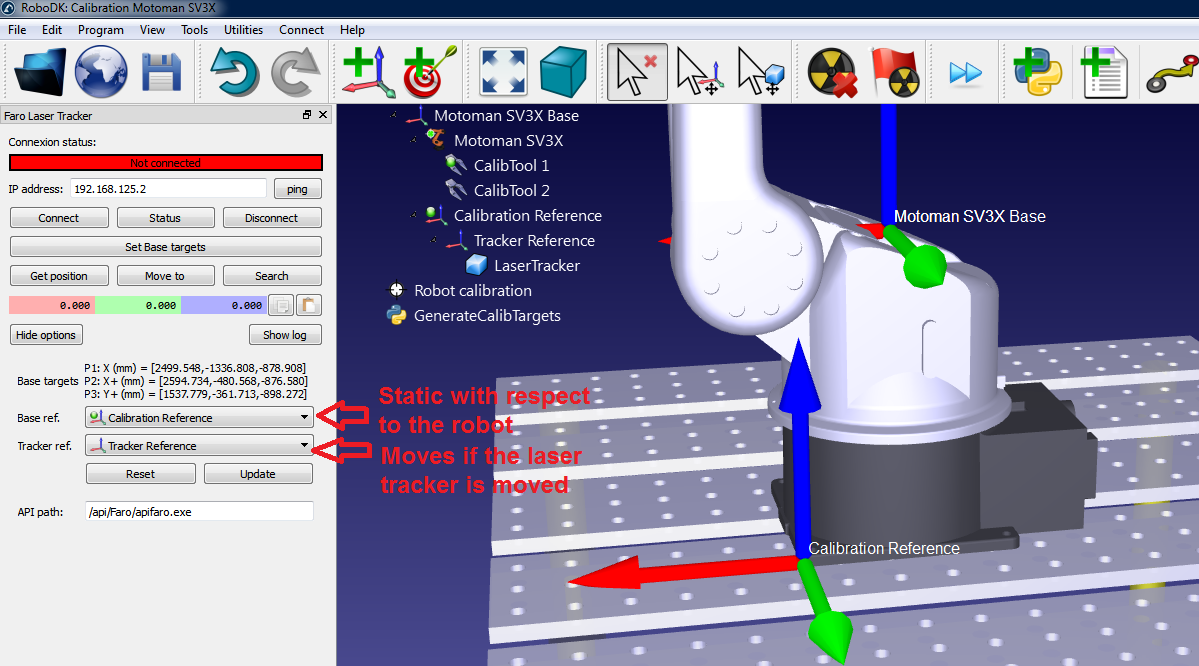
Os pontos básicos do sistema de medição podem ser definidos pressionando "Definir pontos básicos" (veja a imagem a seguir). Essas são três medições que definirão a frame de referência desejada do robô (as duas primeiras medições definem o eixo X e o terceiro ponto o eixo Y positivo). Você deve usar pontos de referência apropriados relacionados à base do robô para que esse procedimento possa ser repetido.
O ângulo de correção para a eixo 1 será o ângulo entre o eixo X da referência de base medido por meio de 3 pontos e a referência de base medida pelo movimento dos eixos 1 e 2 do robô. Obviamente, ambos os vetores são previamente projetados para o plano XY da referência de base obtida ao tocar os pontos da árvore.