Conecte-se ao tracker
O IP do tracker é necessário para configurar corretamente a comunicação no RoboDK. Certifique-se de que o VXelements não esteja em execução e siga estas etapas para verificar a comunicação com o tracker:
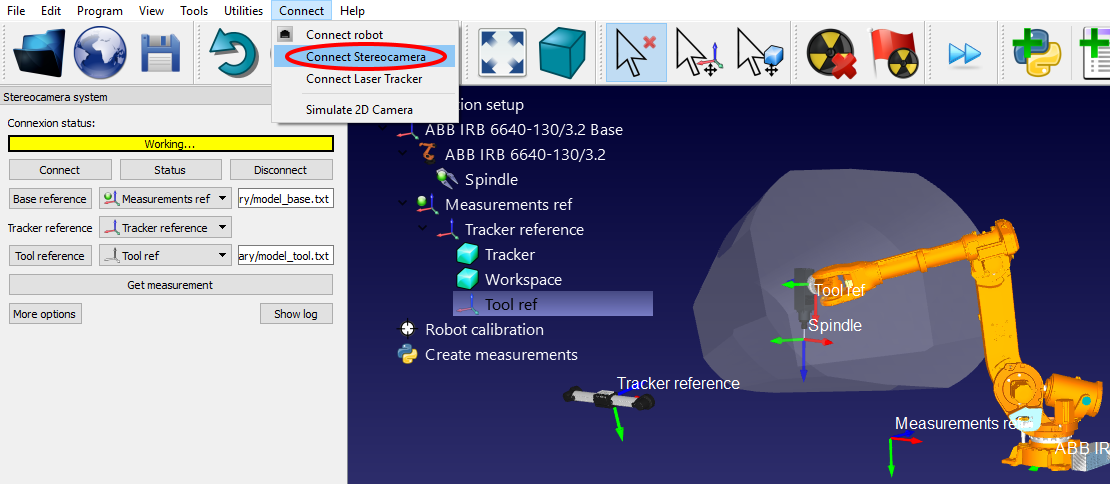
a.Selecione o menu "Conectar ➔ Conectar Estereocamera". Uma nova janela deverá se abrir.
b.Insira o "Modelo de base" e o "Modelo de ferramenta", como arquivos de texto (gerados na seção anterior). Essas são as posições dos pontos que definem a frame de referência e a frame da ferramenta, respectivamente.
c.Selecione o botão "Conectar”.
d.Quando a conexão for bem-sucedida, você deverá fornecer os modelos Base e Ferramenta como arquivos de texto (.txt).
Você verá que uma versão integrada do VXelements é iniciada e, após alguns segundos, deverá ver uma mensagem verde mostrando "Pronto" se a conexão for bem-sucedida. As janelas do VXelements podem ser fechadas e a conexão permanecerá ativa. Se a conexão não for bem-sucedida, você deve se certificar de que nenhum processo do VXelements esteja sendo executado em segundo plano na barra de tarefas do Windows ou no gerenciador de tarefas (selecione CTRL+ALT+DEL para forçar a parada do processo "VXelementsApiImplementation") e, em seguida, selecione Conectar no RoboDK para tentar novamente.