Configuração da calibração do robô
São necessários dois objetos: um objeto ferramenta (segurado pelo robô) e um objeto de referência de base (estático na célula). O tracker deve ser capaz de ver o objeto ferramenta e o objeto de referência de base para cada medição. Esses objetos também são conhecidos como "modelos" (em VXelements) e são definidos por um conjunto de pontos anexados à ferramenta e aos objetos do frame de referência. O tracker rastreia a posição desses pontos, fornecendo o frame de referência desses objetos como uma medida em relação ao tracker. O RoboDK considera cada medição como a posição da ferramenta em relação ao frame de referência de base, de modo que o tracker pode ser movido sem alterar as medições.
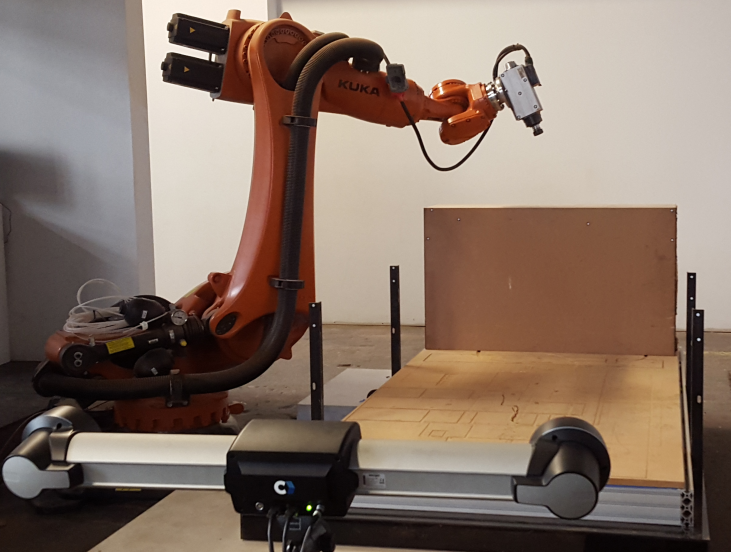
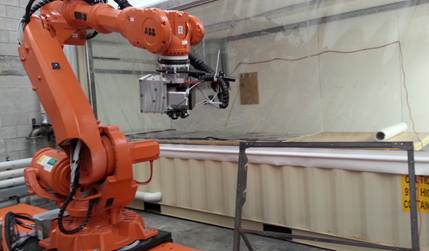
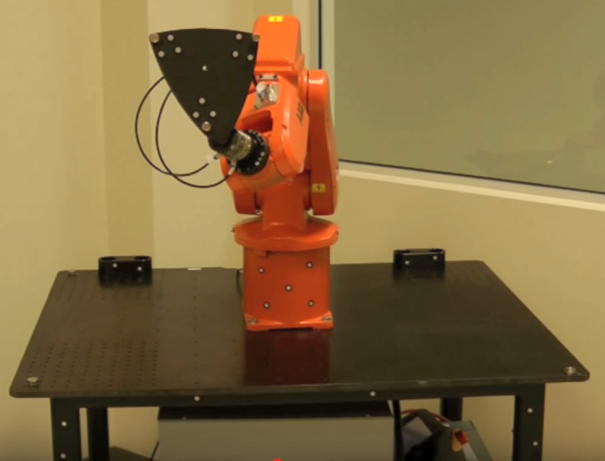
É necessário anexar um grupo de pontos à ferramenta e ao frame de referência, respectivamente, para permitir o rastreamento adequado desses objetos. As imagens a seguir mostram alguns exemplos de configurações apropriadas:

As subseções a seguir devem ser realizadas sequencialmente para que você esteja pronto para começar a fazer medições. Por fim, será necessário conectar o tracker e o robô ao computador para automatizar o procedimento de medição.
Sondagem de frames de referência
Primeiro, são necessários dois modelos: um modelo da ferramenta e um modelo que represente a frame de referência. Um modelo é um objeto definido como uma lista de pontos (coordenadas X,Y,Z) correspondentes aos pontos com relação à referência do modelo (ferramenta ou frame de referência de base).
Você deve seguir essas etapas duas vezes para definir a ferramenta e os modelos básicos:
1.Conecte-se ao VXElements selecionando Conectar ➔ Conectar Creaform's C-Track Optical CMM.
2.Selecione Conectar e aguarde até que a conexão esteja pronta.
Certifique-se de calibrar o tracker e a HandyProbe, se isso for exigido pelo VXElements. Certifique-se também de ter as opções de software VXTrack e VXModel fornecidas pela Creaform.
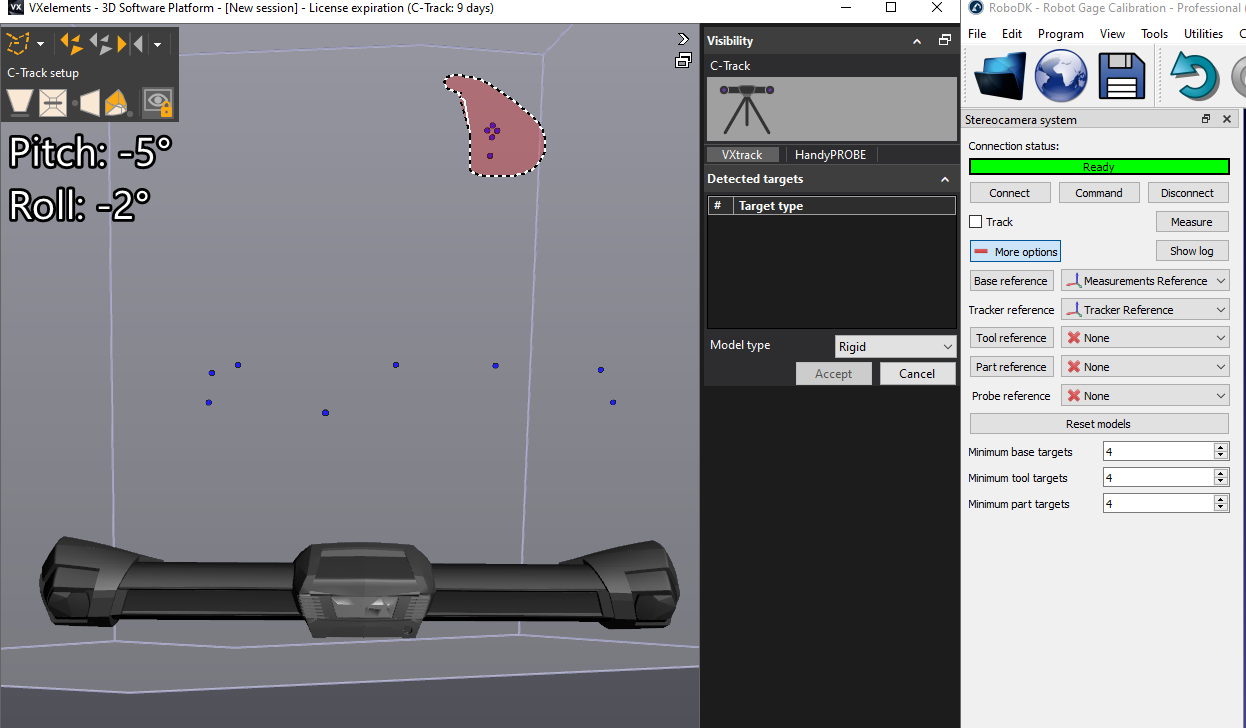
3.Selecione Referência da Base no RoboDK. O VXelements será aberto e exibirá pontos de posicionamento visíveis. Você deve selecionar os pontos estáticos. Certifique-se de selecionar todos os pontos que representam a referência estática. Você não deve incluir pontos que possam se mover.

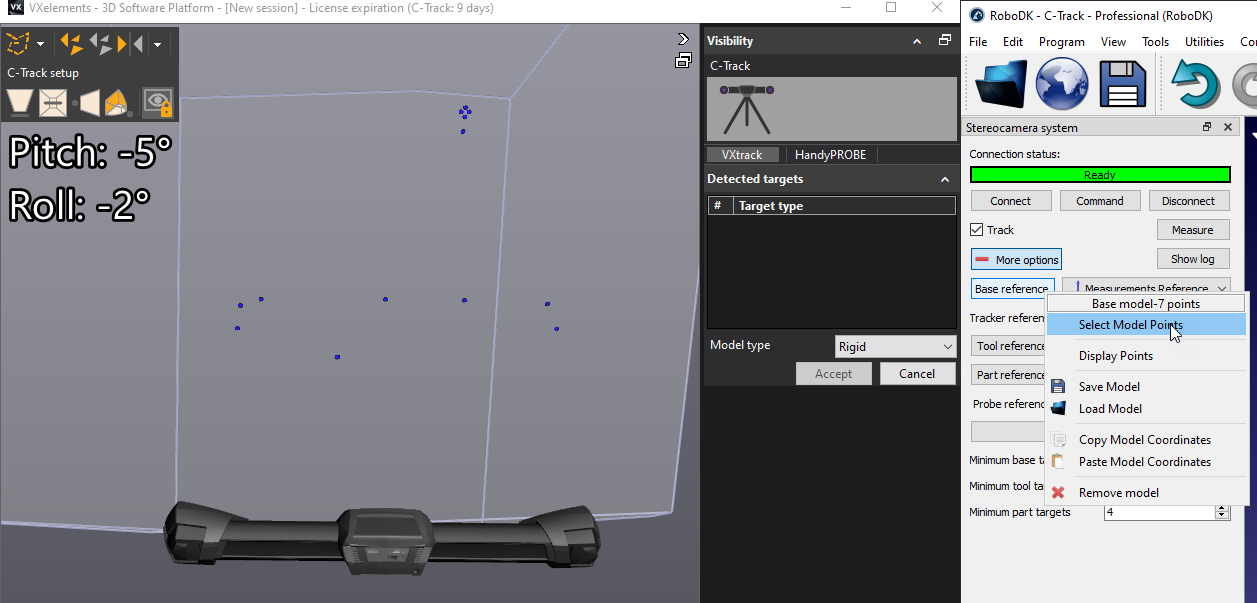
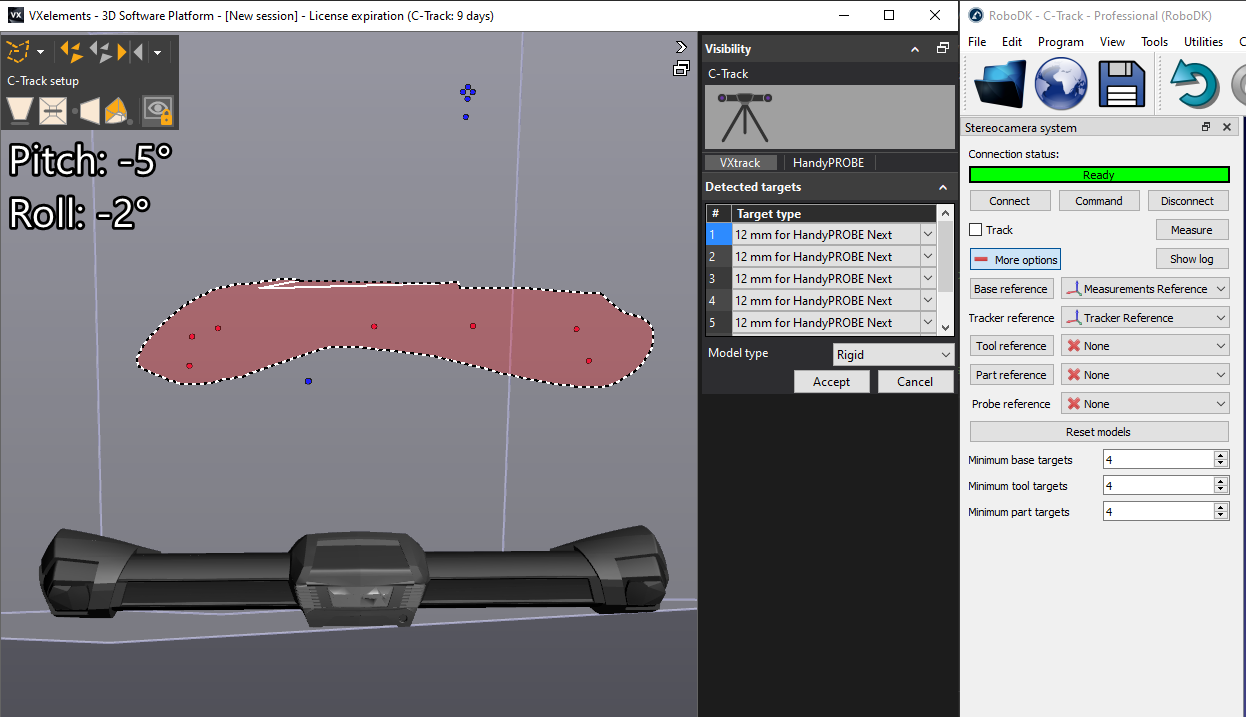
4.Selecione Referência da ferramenta no RoboDK e repita essa operação selecionando os pontos que representam o modelo da ferramenta.
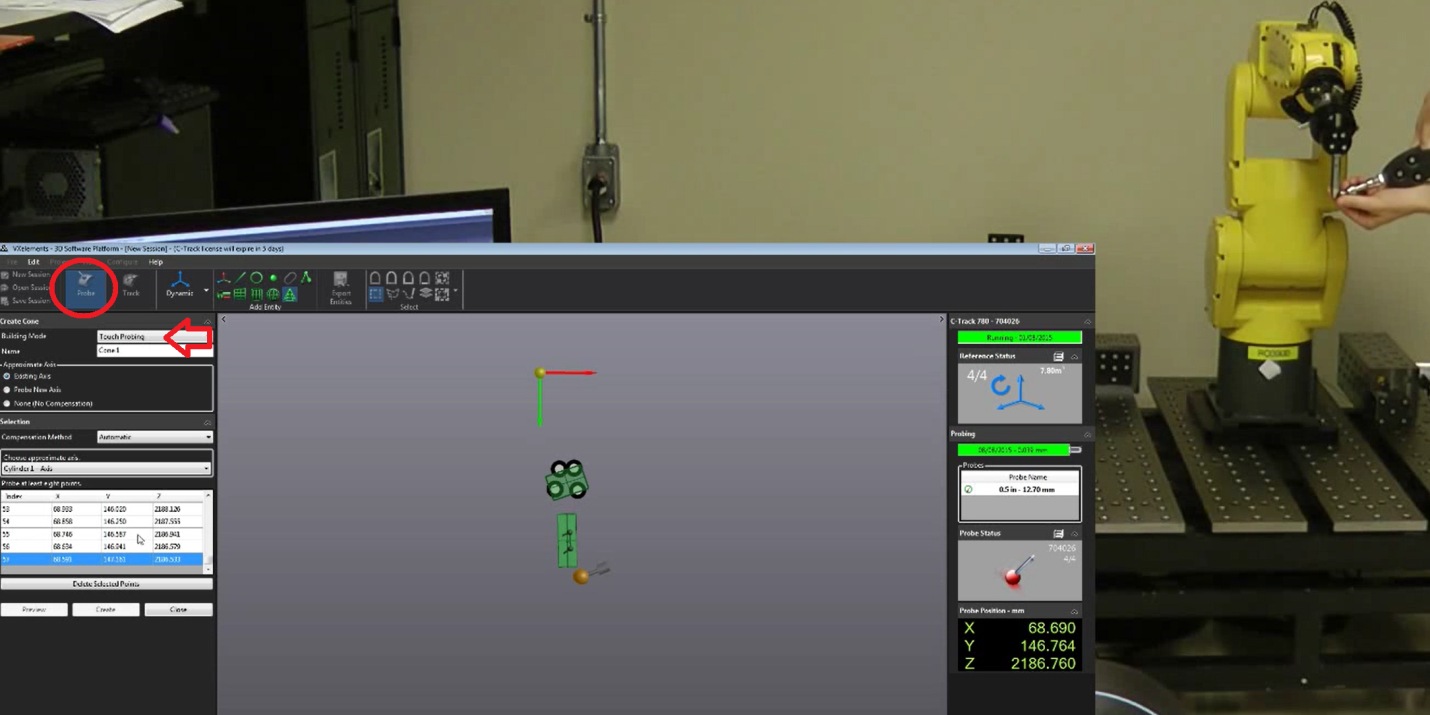
Para mover adequadamente o frame de referência do objeto, você deve usar o HandyProbe e trazer esses recursos para a sessão virtual do VXelements. O modelo que está sendo usado deve ser definido como o modelo de posicionamento para que os recursos sejam sondados em relação a esse modelo. É possível sondar pontos, linhas, planos, cilindros, cones e definir frames de referência com relação a esses recursos.
Conecte-se ao tracker
O IP do tracker é necessário para configurar corretamente a comunicação no RoboDK. Certifique-se de que o VXelements não esteja em execução e siga estas etapas para verificar a comunicação com o tracker:
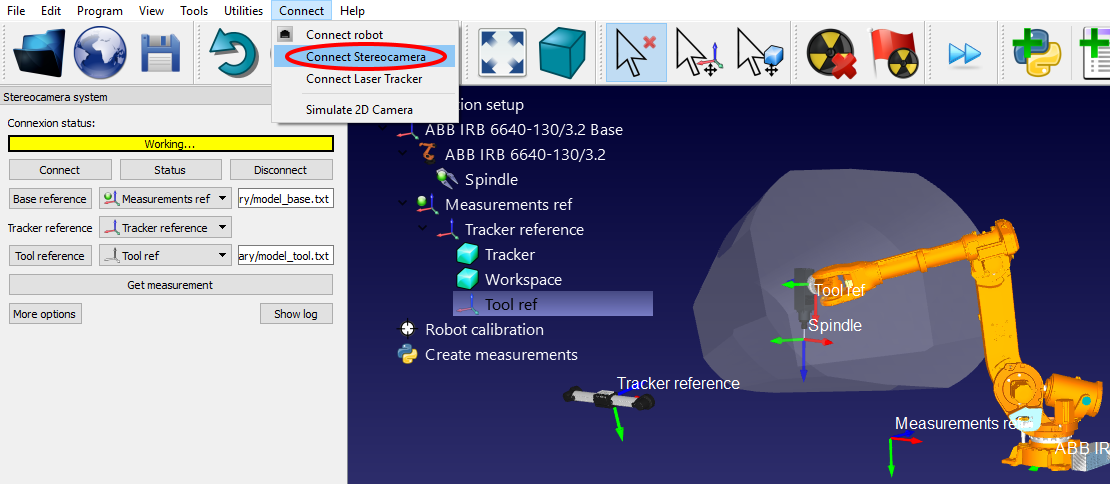
a.Selecione o menu "Conectar ➔ Conectar Estereocamera". Uma nova janela deverá se abrir.
b.Insira o "Modelo de base" e o "Modelo de ferramenta", como arquivos de texto (gerados na seção anterior). Essas são as posições dos pontos que definem a frame de referência e a frame da ferramenta, respectivamente.
c.Selecione o botão "Conectar”.
d.Quando a conexão for bem-sucedida, você deverá fornecer os modelos Base e Ferramenta como arquivos de texto (.txt).
Você verá que uma versão integrada do VXelements é iniciada e, após alguns segundos, deverá ver uma mensagem verde mostrando "Pronto" se a conexão for bem-sucedida. As janelas do VXelements podem ser fechadas e a conexão permanecerá ativa. Se a conexão não for bem-sucedida, você deve se certificar de que nenhum processo do VXelements esteja sendo executado em segundo plano na barra de tarefas do Windows ou no gerenciador de tarefas (selecione CTRL+ALT+DEL para forçar a parada do processo "VXelementsApiImplementation") e, em seguida, selecione Conectar no RoboDK para tentar novamente.
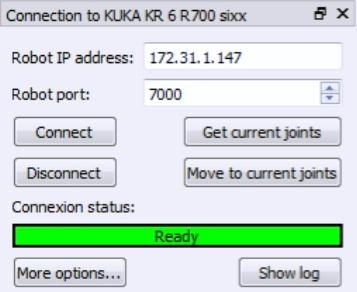
Conecte-se ao robô
O IP do robô (ou o número da porta COM para conexões RS232) é necessário para configurar corretamente a comunicação com o RoboDK. Siga estas etapas para verificar a comunicação com o robô:
1.Selecione Conectar ➔ Conectar ao robô. Uma nova janela será exibida.
2.Defina o IP e a porta do robô (ou a porta COM se a conexão for via RS232).
3.Clique no botão Conectar.
4.Consulte o apêndice se surgir algum problema.
Se a conexão for bem-sucedida, você verá uma mensagem verde exibindo Pronto. A posição do robô virtual deve corresponder exatamente à posição do robô real se você selecionar Obter Posição. Como alternativa, selecione Mover Eixos para mover o robô para a posição atual definida no simulador. A janela pode ser fechada e a conexão permanecerá ativa.