Filtragem de programas
Depois que o robô tiver sido calibrado, você tem duas opções para gerar programas usando a precisão absoluta do robô calibrado:
●Filtrar programas existentes: todos os pontos do robô dentro de um programa são modificados para melhorar a precisão do robô. Isso pode ser feito manualmente ou usando a API.
●Use o RoboDK para programação off-line para gerar programas precisos (os programas gerados já estão filtrados, incluindo os programas gerados usando a API).
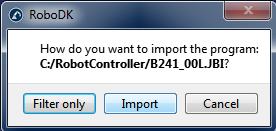
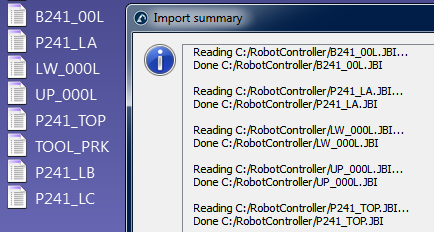
Para filtrar um programa existente manualmente: arraste e solte o arquivo do programa do robô na tela principal do RoboDK (ou selecione Arquivo ➔ Abrir) e selecione Apenas Filtrar. O programa será filtrado e salvo na mesma pasta. O resumo do filtro mencionará se houve algum problema ao usar o algoritmo de filtragem. Você também tem a opção de importar um programa se quiser simulá-lo dentro do RoboDK. Se o programa tiver alguma dependência (definições de frame de ferramentas ou frame de base, subprogramas, ...), elas deverão estar localizadas no mesmo diretório em que o primeiro programa for importado.
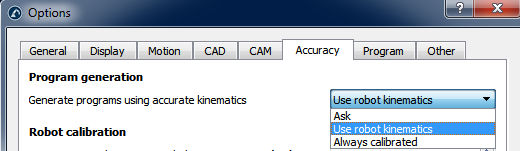
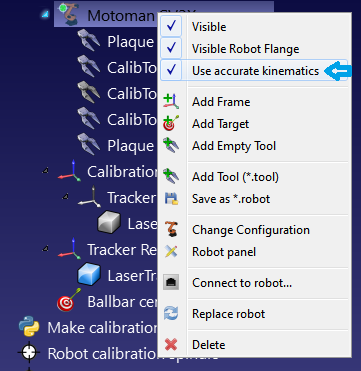
Depois de importar o programa para o RoboDK, você pode gerá-lo novamente com ou sem precisão absoluta. Nas configurações principais de precisão do RoboDK (Ferramentas ➔ Opções ➔ Precisão), você pode decidir se deseja sempre gerar os programas usando a cinemática precisa, se deseja perguntar todas as vezes ou se deseja usar a cinemática atual do robô. A cinemática atual do robô pode ser alterada clicando com o botão direito do mouse no robô e ativando/desativando a tag "Usar cinemática precisa". Se ela estiver ativa, você verá um ponto verde; se não estiver ativa, verá um ponto vermelho.
Filtrar programas com a API
É possível filtrar um programa completo usando o RoboDK com um robô calibrado e o programa do robô usando a chamada FilterProgram:
robot.FilterProgram(Arquivo _program)
Um exemplo de macro chamado FilterProgram está disponível na seção Macros da biblioteca. O código a seguir é um exemplo de script Python que usa a API do RoboDK para filtrar um programa.
from robolink import * # API para se comunicar com o RoboDK
from robodk import * # operações básicas de matriz
import os # Operações de caminho
# Obter o diretório de trabalho atual
CWD= os.path.dirname(os.path.realpath(__Arquivo __))
# Inicie o RoboDK se ele não estiver em execução e vincule-o à API
RDK = Robolink()
# Opcional: forneça os seguintes argumentos para execução nos bastidores
#RDK= Robolink(args='/NOSPLASH /NOSHOW /HIDDEN')
# Obtenha a estação calibrada (arquivo .rdk) ou o arquivo do robô (.robot):
# Dica: após a calibração, clique com o botão direito do mouse em um robô e selecione "Save as .robot" (Salvar como .robô)
calibration_Arquivo = CWD+ '/KUKA-KR6.rdk'
# Obter o arquivo do programa:
Arquivo _program= CWD+ '/Prog1.src'
# Carregue o arquivo RDK ou o arquivo do robô:
calib_item= RDK.AddArquivo (calibration_Arquivo )
se não for calib_item.Valid():
raise Exception("Something went wrong loading "+ calibration_Arquivo )
# Recupere o robô (não haverá pop-up se houver apenas um robô):
robot= RDK.ItemUserPick('Select a robot to filter', ITEM_TYPE_ROBOT)
se não for robot.Valid():
raise Exception("Robot not selected or not available")
# Ativar a precisão
robot.setAccuracyActive(1)
# Filtrar programa: isso salvará automaticamente uma cópia do programa
# com um arquivo renomeado, dependendo da marca do robô
status, summary= robot.FilterProgram(Arquivo _program)
se o status== 0:
print("Program filtering succeeded")
print(summary)
calib_item.Delete()
RDK.CloseRoboDK()
E mais:
print("A filtragem do programa falhou! Código de erro: %i" % status)
print(summary)
RDK.ShowRoboDK()
Filtrar pontos com a API
O código a seguir é um exemplo de script Python que usa a API do RoboDK para filtrar um ponto (ponto de pose ou angular), usando o comando FilterTarget:
pose_filt, joints = robot.FilterTarget(nominal_pose, estimated_joints)
Esse exemplo é útil se um aplicativo de terceiros (que não seja o RoboDK) gerar o programa do robô usando pontos de pose.
from robolink import * # API para se comunicar com o RoboDK
from robodk import * # operações básicas de matriz
def XYZWPR_2_Pose(xyzwpr):
return KUKA_2_Pose(xyzwpr) # Converta X,Y,Z,A,B,C em uma pose
def Pose_2_XYZWPR(pose):
return Pose_2_KUKA(pose) # Converta uma pose em X,Y,Z,A,B,C
# Inicie a API do RoboDK e recupere o robô:
RDK= Robolink()
robô= RDK.Item('', ITEM_TYPE_ROBOT)
se não for robot.Valid():
raise Exception("Robot not available")
pose_tcp= XYZWPR_2_Pose([0, 0, 200, 0, 0, 0, 0]) # Define o TCP
pose_ref= XYZWPR_2_Pose([400, 0, 0, 0, 0, 0, 0]) # Define o frame de referência
# Atualizar o TCP do robô e o frame de referência
robot.setTool(pose_tcp)
robot.setFrame(pose_ref)
# Muito importante para SolveFK e SolveIK (cinemática direta/inversa)
robot.setAccuracyActive(False) # A precisão pode ser ativada ou desativada
# Definir um ponto nominal no espaço da eixo:
eixos= [0, 0, 90, 0, 90, 0]
# Calcular a posição nominal do robô para o ponto da eixo:
pose_rob= robot.SolveFK(joints) # flange do robô em relação à base do robô
# Calcular pose_ponto: o TCP em relação ao frame de referência
pose_target= invH(pose_ref)*pose_rob*pose_tcp
print('Target not filtered:')
print(Pose_2_XYZWPR(pose_target))
joints_approx= joints # joints_approx deve estar dentro de 20 graus
pose_target_filt, real_joints= robot.FilterTarget(pose_target, joints)
print('Target filtered:')
print(real_joints.tolist())
print(Pose_2_XYZWPR(pose_target_filt))