Gerar alvos de calibração
Há quatro conjuntos de medições que são necessários para realizar a calibração do robô com sucesso:
1.Configuração básica: são necessárias seis medições (ou mais) movendo os eixos 1 e 2 para posicionar a referência de calibração em relação ao robô. Selecione Show (Mostrar) na janela de configurações de calibração e o robô se moverá ao longo da sequência.
2.Configuração da ferramenta: são necessárias sete ou mais medições para calibrar o flange da ferramenta e os alvos da ferramenta (eixo móvel 5 e 6). Selecione Show e o robô se moverá ao longo da sequência.
3.Medições de calibração: São necessárias 60 medições ou mais para calibrar o robô. Essas medições podem ser colocadas aleatoriamente no espaço de trabalho do robô e não podem colidir com os objetos ao redor.
4.Medições de validação (opcional): podem ser usadas quantas medições o senhor desejar para validar a precisão do robô. Essas medições são usadas somente para validar a precisão do robô e não para calibrar o robô.
Os dois primeiros conjuntos de medições são gerados automaticamente pelo RoboDK. Selecione Show e o robô seguirá a sequência (como mostrado nas imagens a seguir). Se a sequência precisar ser alterada, selecione Measure (Medir) e exporte as medições de calibração como um arquivo CSV, selecionando Export data (Exportar dados). Esse arquivo pode ser editado usando uma planilha do Excel e reimportado clicando em Import data (Importar dados).
Os dois últimos conjuntos de medições (calibração e validação) podem ser gerados usando o script de macro chamado "
●Número de medições: O número de medições a serem geradas. Por padrão, são usadas 80 medições porque é necessário um mínimo de 60 medições para a calibração do robô.
●Posição de referência: A posição de referência deve ser uma posição do robô em que a ferramenta esteja voltada para o rastreador com alvos visíveis.
●Limites das juntas: Os limites inferior e superior da junta devem ser fornecidos.
●Limites cartesianos: O senhor pode fornecer limites cartesianos (valores X, Y, Z) em relação ao quadro de referência do robô.
O script gera automaticamente medições em que a ferramenta está voltada para o rastreador, além de respeitar as restrições cartesianas e de articulação. Uma rotação de +/-180 graus em torno da ferramenta é permitida em torno da direção que está voltada para o rastreador na posição de referência. Além disso, a sequência de movimentos das articulações é livre de colisões e está dentro do espaço de trabalho de medição (se o espaço de trabalho estiver definido como visível). A imagem a seguir mostra o resumo que é apresentado ao usuário antes do início da sequência automática. A sequência pode levar até 5 minutos para ser concluída.

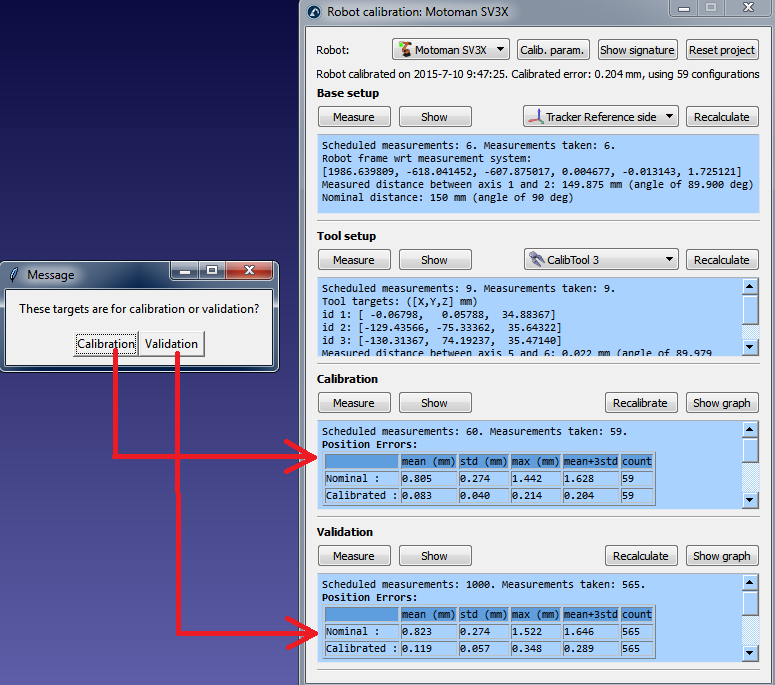
Uma nova mensagem aparecerá quando o algoritmo for concluído. Selecione Calibração para usar as 60 medições para calibração do robô. O senhor pode executar novamente o mesmo script para gerar outro conjunto de medições para validação. Essa etapa é opcional, mas recomenda-se 60 medições ou mais para fins de validação.
Se desejar, o senhor pode modificar o script clicando com o botão direito do mouse em Create measurements script e selecionando Edit script e, em seguida, modificando parâmetros adicionais do algoritmo. O script salva automaticamente a entrada do usuário como parâmetros da estação. O senhor pode visualizar, editar ou excluir essas configurações clicando com o botão direito do mouse na estação e selecionando Station parameters (Parâmetros da estação), conforme mostrado na próxima imagem.

Por fim, também é possível importar configurações que foram selecionadas manualmente, selecionando Importar dados (dentro do menu Medida). O senhor pode importar um arquivo CSV ou TXT como uma matriz Nx6, em que N é o número de configurações.
