Masterização de robôs
Depois que o robô é calibrado, você geralmente precisa do RoboDK para filtrar os programas, portanto, é necessária uma licença do RoboDK (uma licença OLP básica é suficiente para gerar programas de robôs precisos depois que o robô é calibrado). Filtrar um programa significa que os pontos em um programa são alterados/otimizados para melhorar a precisão do robô, levando em conta todos os parâmetros de calibração (cerca de 30 parâmetros).
Como alternativa, você pode calibrar apenas os deslocamentos dos eixos mais os frames de referência da base e da ferramenta (4 parâmetros de deslocamento dos eixos mais 6 parâmetros para o frame da base mais 6 parâmetros para o frame da ferramenta). A calibração não será tão precisa quanto se você usasse a calibração completa padrão, mas pode permitir a inserção de determinados parâmetros no controlador do robô e não depender do RoboDK para gerar programas de robô.
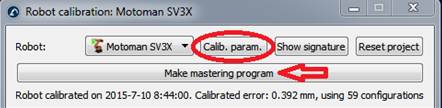
Para obter a calibração somente para os deslocamentos dos eixos, você deve selecionar o botão Calib. Param. e, em seguida, o botão Masterização (dentro do menu de calibração do robô).

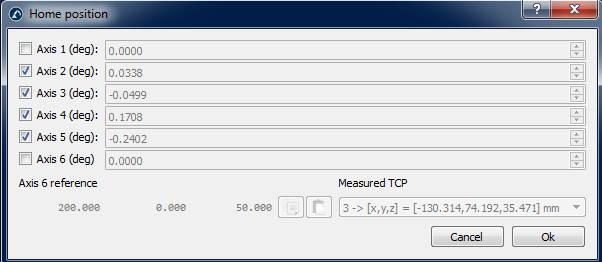
Uma nova janela aparecerá depois que você selecionar Criar programa de masterização. Nessa janela, você pode selecionar os eixos que deseja considerar para criar a nova posição inicial
O botão Criar programa de masterização aparecerá na janela de calibração do robô. Selecione esse botão para gerar um programa que levará o robô à nova posição inicial. Transfira-o para o robô e execute-o. Em seguida, a nova posição inicial deve ser registrada.
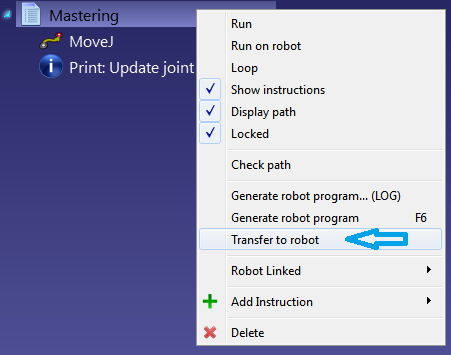
Se o robô e o PC estiverem conectados, você pode clicar com o botão direito do mouse no programa e selecionar Enviar programa para o robôpara enviar automaticamente o programa para o robô. Caso contrário, você pode selecionar Gerar programa do robô para ver os novos valores de eixo para a posição inicial.