Referência do eixo 1
Você deve medir corretamente três pontos de base antes de iniciar a calibração do robô se quiser alinhar o eixo 1 com a frame de base real do robô. Esses pontos de base devem ser escolhidos de modo que o frame de referência possa ser encontrado em relação ao robô.
A posição "inicial" do eixo 1 depende diretamente dos três pontos da base, bem como da configuração da base do robô. A configuração da base do robô é a primeira etapa de calibração, na qual a frame de base do sistema de medição é posicionada em relação à frame de base do robô, movendo e medindo os eixos 1 e 2.
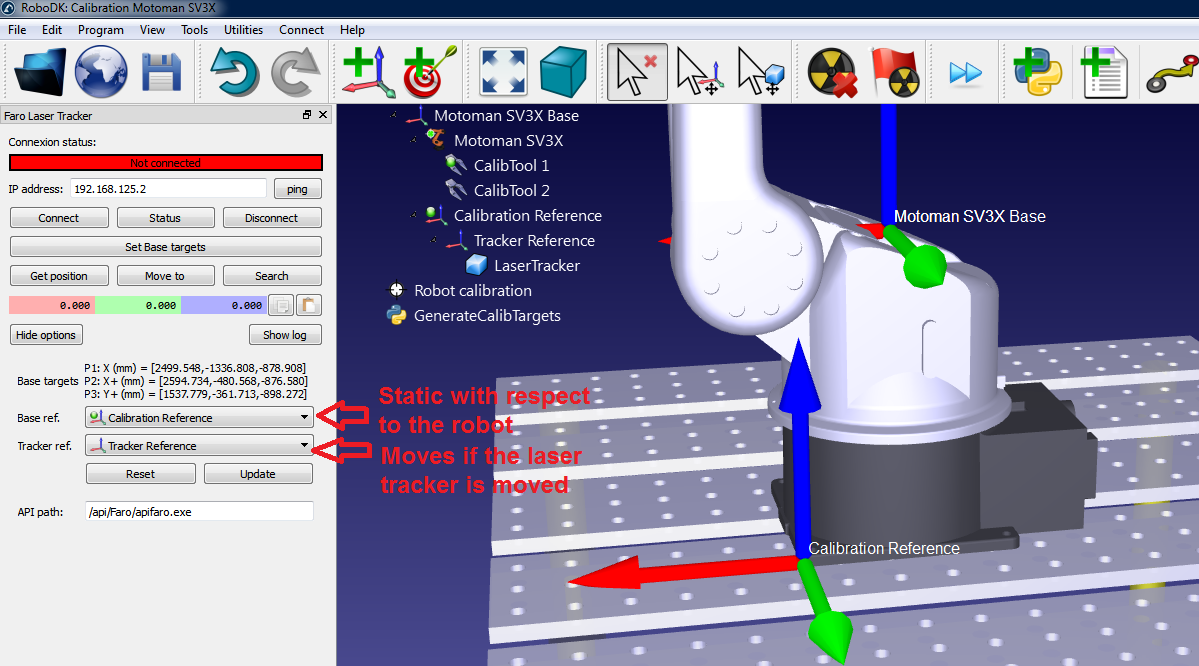
Os pontos básicos do sistema de medição podem ser definidos pressionando "Definir pontos básicos" (veja a imagem a seguir). Essas são três medições que definirão a frame de referência desejada do robô (as duas primeiras medições definem o eixo X e o terceiro ponto o eixo Y positivo). Você deve usar pontos de referência apropriados relacionados à base do robô para que esse procedimento possa ser repetido.
O ângulo de correção para a eixo 1 será o ângulo entre o eixo X da referência de base medido por meio de 3 pontos e a referência de base medida pelo movimento dos eixos 1 e 2 do robô. Obviamente, ambos os vetores são previamente projetados para o plano XY da referência de base obtida ao tocar os pontos da árvore.