Resultados
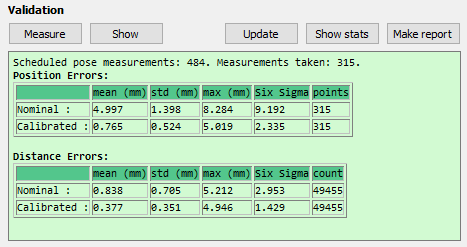
Após a conclusão da calibração, você pode analisar a melhoria da precisão lendo as estatísticas fornecidas pelo RoboDK. Para exibir essas estatísticas, abra a janela de calibração do robô (clique duas vezes no ícone Calibração de Robôs). A janela de resumo na seção de validação exibirá os erros antes da calibração (cinemática nominal) e após a calibração (cinemática calibrada). São fornecidas duas tabelas: uma mostra as estatísticas referentes aos erros de posição e a outra mostra os erros de distância:
●Erros de posição: O erro de posição é a precisão que o robô pode atingir em um ponto com relação a um frame de referência.
●Erros de distância: O erro de distância é obtido pela medição do erro de distância de pares de pontos. A distância entre dois pontos vista pelo robô (obtida usando a cinemática calibrada) é comparada com a distância vista pelo sistema de medição (medida fisicamente). Todas as combinações são levadas em conta. Se você fez 315 medições, terá 315x315/2= 49455 valores de erro de distância.
As estatísticas fornecidas são o erro médio, o desvio padrão (std) e o erro máximo. Também é fornecida a média mais três vezes o desvio padrão, que corresponde ao erro esperado para 99,98% de todas as medições (se você levar em conta que os erros seguem uma distribuição normal).
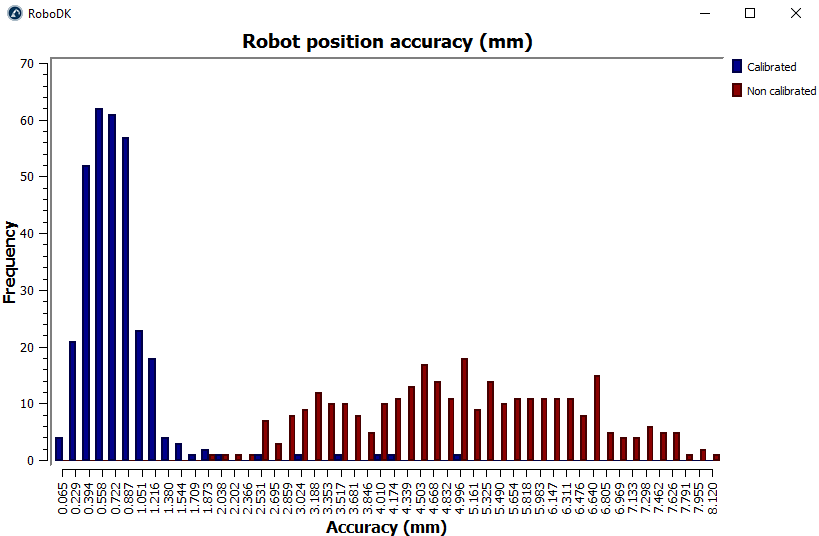
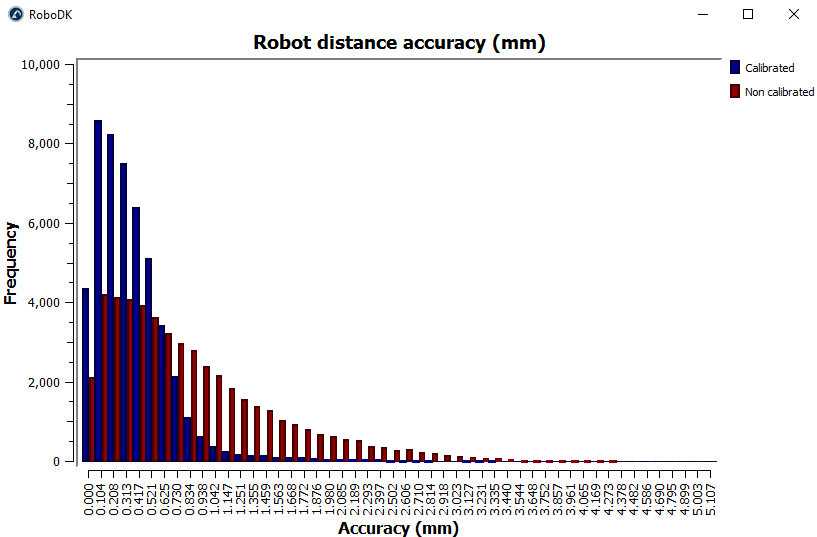
Selecione Mostrar estatísticas e dois histogramas mostrarão a distribuição dos erros antes e depois da calibração, um histograma para a precisão da posição e o outro para a precisão da distância. As imagens a seguir correspondem às 315 medições de validação usadas neste exemplo.
Por fim, você pode selecionar "Gerar relatório" e será gerado um relatório em PDF com as informações apresentadas nesta seção.