Sondagem de frames de referência
Primeiro, são necessários dois modelos: um modelo da ferramenta e um modelo que represente a frame de referência. Um modelo é um objeto definido como uma lista de pontos (coordenadas X,Y,Z) correspondentes aos pontos com relação à referência do modelo (ferramenta ou frame de referência de base).
Você deve seguir essas etapas duas vezes para definir a ferramenta e os modelos básicos:
1.Conecte-se ao VXElements selecionando Conectar ➔ Conectar Creaform's C-Track Optical CMM.
2.Selecione Conectar e aguarde até que a conexão esteja pronta.
Certifique-se de calibrar o tracker e a HandyProbe, se isso for exigido pelo VXElements. Certifique-se também de ter as opções de software VXTrack e VXModel fornecidas pela Creaform.
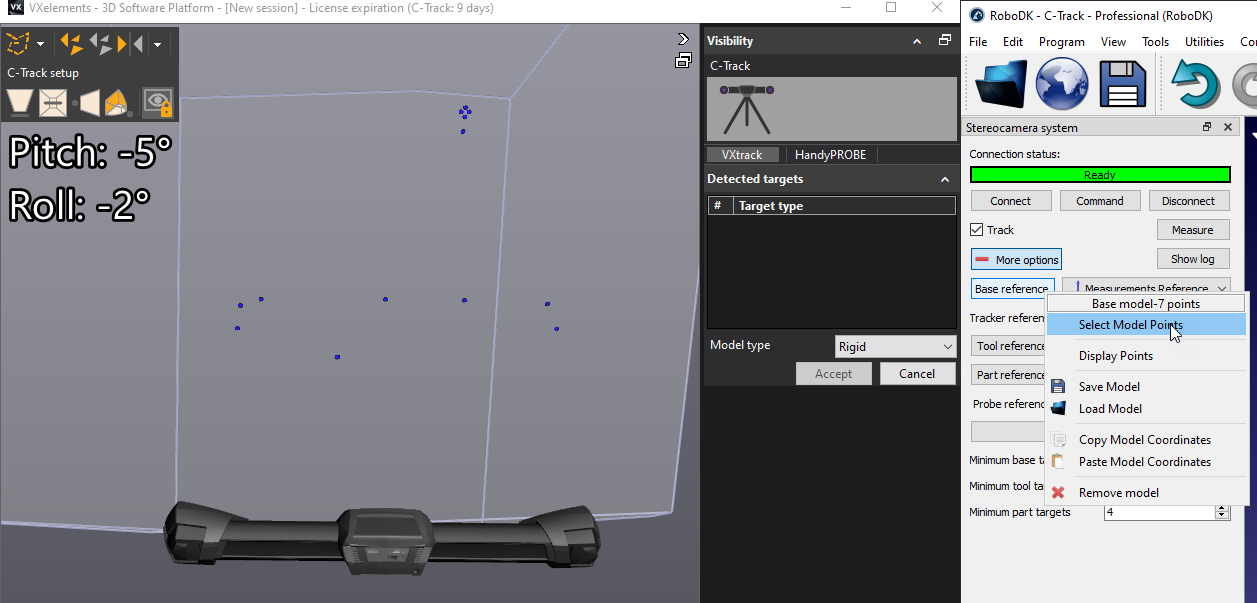
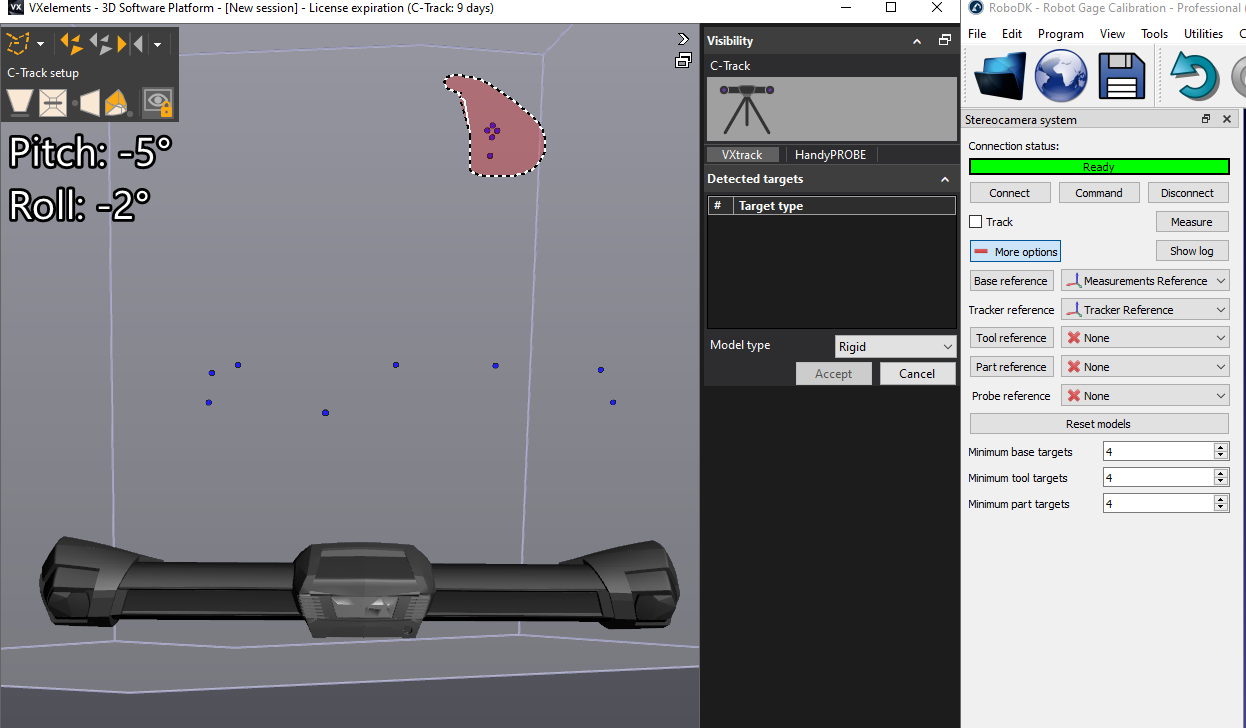
3.Selecione Referência da Base no RoboDK. O VXelements será aberto e exibirá pontos de posicionamento visíveis. Você deve selecionar os pontos estáticos. Certifique-se de selecionar todos os pontos que representam a referência estática. Você não deve incluir pontos que possam se mover.

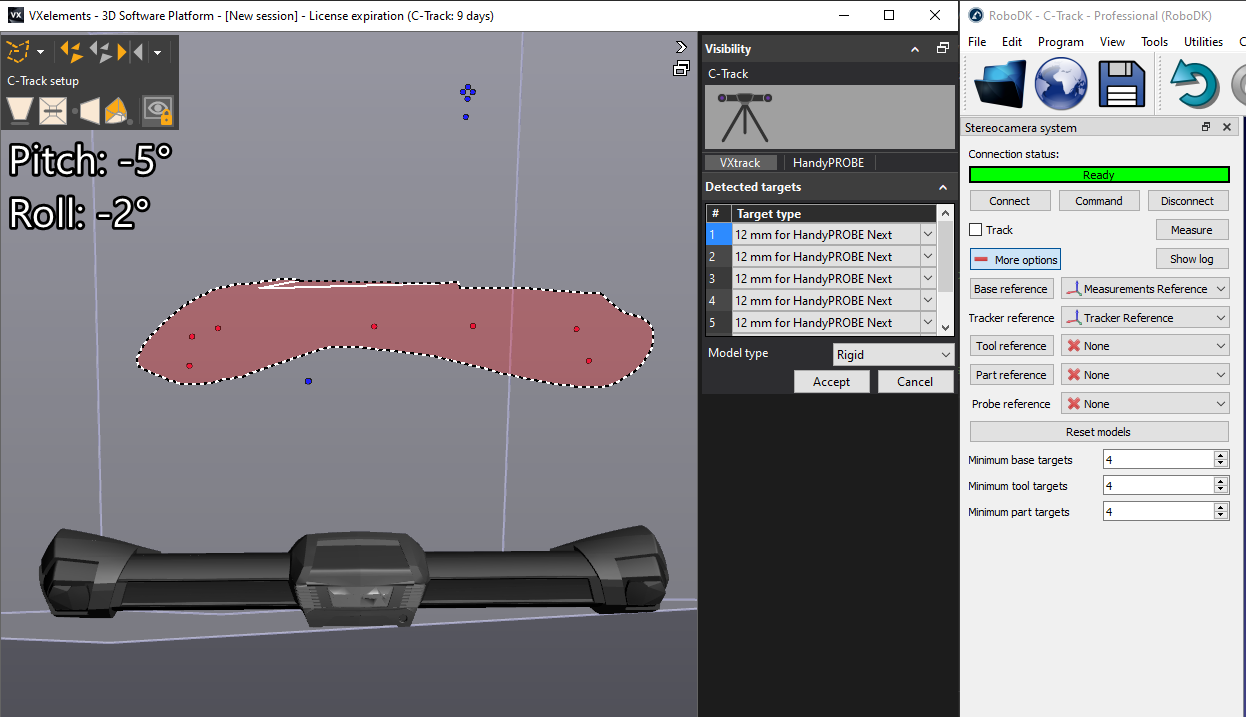
4.Selecione Referência da ferramenta no RoboDK e repita essa operação selecionando os pontos que representam o modelo da ferramenta.
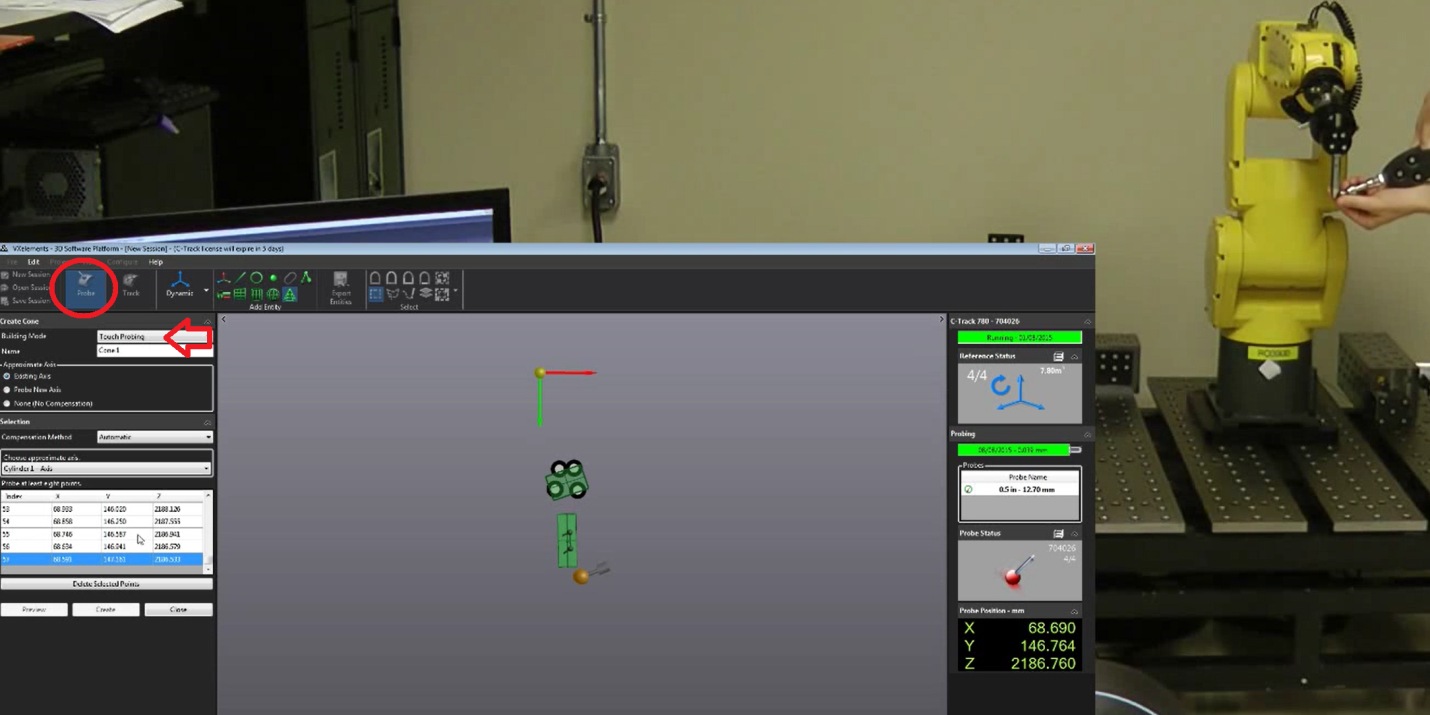
Para mover adequadamente o frame de referência do objeto, você deve usar o HandyProbe e trazer esses recursos para a sessão virtual do VXelements. O modelo que está sendo usado deve ser definido como o modelo de posicionamento para que os recursos sejam sondados em relação a esse modelo. É possível sondar pontos, linhas, planos, cilindros, cones e definir frames de referência com relação a esses recursos.