Anexo II - Teste o laser tracker Faro
A calibração do robô requer a realização de medições do robô com um sistema de medição. Para fazer essas medições, é necessário um Laser tracker Faro que se comunica com um computador. A comunicação é feita por meio de um arquivo exe de driver que pode ser executado no modo console.
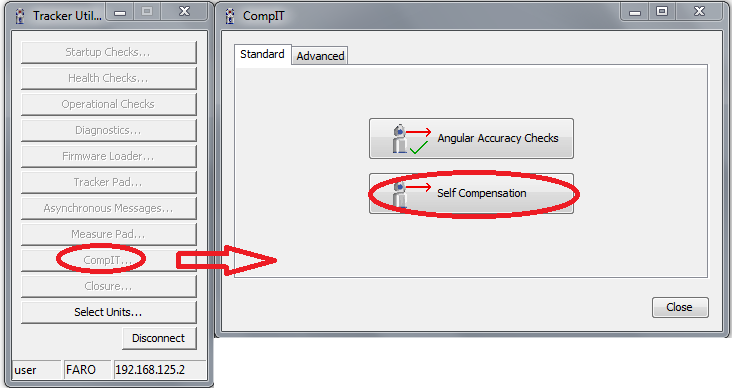
Por exemplo, a Faro fornece um aplicativo gratuito chamado "Tracker Utilities". Esse aplicativo pode inicializar o laser tracker e realizar algumas verificações de integridade, entre outras coisas.
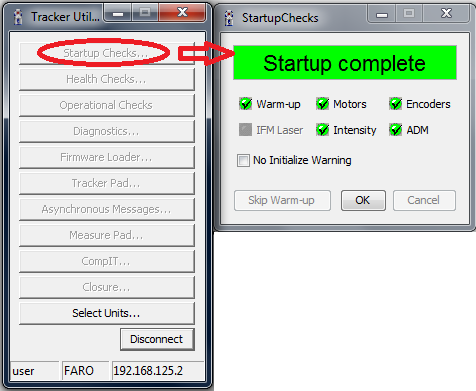
Para inicializar o tracker, você deve iniciar o aplicativo "Tracker Utilities", conectar-se usando o IP do tracker e, em seguida, selecionar "Startup Checks" (Verificações de inicialização). Quando o tracker for inicializado, você deve colocar um ponto SMR de 1,5'' na posição "home" antes da inicialização. Caso contrário, a luz verde piscará após a inicialização e as medições não serão válidas.
Quando a inicialização for concluída, você deverá ler a mensagem "Startup complete" (Inicialização concluída), conforme mostrado na imagem a seguir.

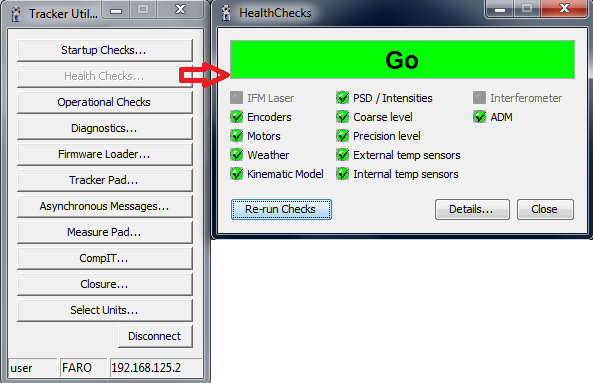
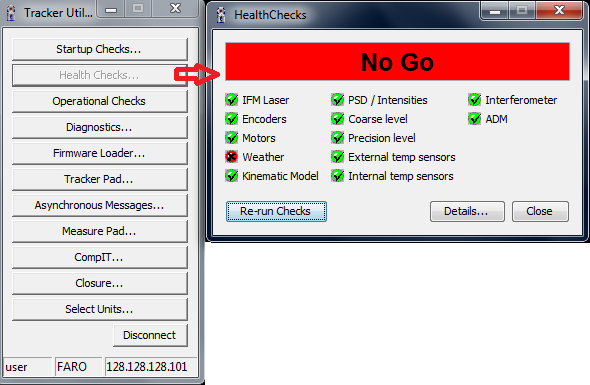
Se tiver problemas com o tracker, você pode executar algumas verificações de integridade pressionando "Health Checks...". As duas imagens a seguir mostram uma verificação bem-sucedida e uma verificação com falha, respectivamente. Às vezes, os problemas são resolvidos depois de reconectar os cabos e reiniciar o laser tracker.
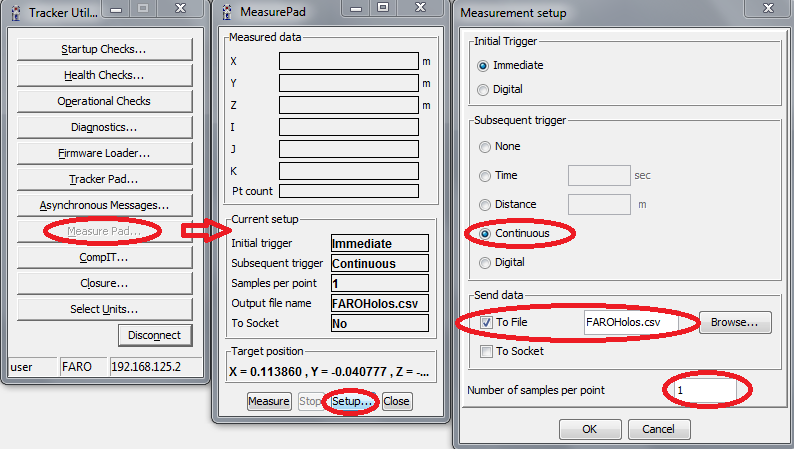
Por fim, você pode usar o "Measurepad" para fazer algumas medições. O laser tracker pode seguir um ponto e medir a posição XYZ a uma taxa de 1000 Hz. Se você definir 1 exemplo por ponto e disparo contínuo, o tracker registrará 1.000 medições por segundo em um arquivo CSV.
Você pode usar esse recurso para medir o caminho de um robô e usar a verificação de precisão do caminho do RoboDK para verificar a precisão, a velocidade e a aceleração ao longo do caminho.