Calibração do frame de referência
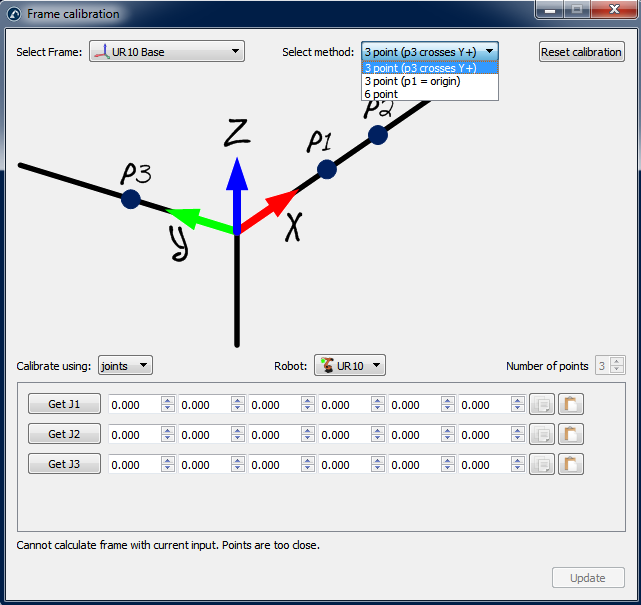
Selecione Utilitários➔ Calibrar Referência para calibrar um frame de referência. É possível definir um frame de referência usando diferentes métodos. No exemplo da figura, um frame de referência é definido por três pontos: os pontos 1 e 2 definem a direção do eixo X e o ponto 3 define o eixo Y positivo.
Importante: é recomendável usar pontos joint e ativar a precisão do robô antes de calibrar a estrutura de referência, pois a precisão do braço do robô ajudará a definir melhor a estrutura de referência.
Observação: Há mais informações disponíveis sobre a calibração do frame de referência na seção de dicas.