Calibração do robô
A calibração do robô é dividida em 4 etapas. Cada etapa requer a realização de um conjunto de medições. Essas quatro etapas devem ser seguidas em ordem:
1.Medições de referência de base (3 minutos).
2.Medições de referência da ferramenta (3 minutos).
3.Medições de calibração (7 minutos, 60 medições).
4.Medições de validação (7 minutos, 60 medições).
O vídeo a seguir mostra como realizar essa calibração em 20 minutos: https://www.robodk.com/robot-calibration#tab-lt. As medições de validação (etapa 4) não são obrigatórias para calibrar o robô, mas fornecem um ponto de vista objetivo dos resultados de precisão. Também é possível ver o impacto de calibrar o robô em uma área e validá-lo em uma área diferente.
Selecione o botão Medir para cada um dos quatro conjuntos de medições. Isso abrirá uma nova janela que permite fazer novas medições, bem como importar e exportar medições existentes em um arquivo de texto (formato csv ou txt).
Por padrão, o robô e o sistema de medição são sincronizados automaticamente por meio do robô conectado. Se um driver de robô não estiver disponível, você ainda poderá realizar a calibração do robô gerando um programa de robô que solicitará ao usuário no terminal de programação a sincronização manual.
1.Desmarque a opção Sincronização automática.
2.Clique no botão Criar programa do robô.
3.Use o pós-processador adequado para gerar o programa do robô.
Medição da base
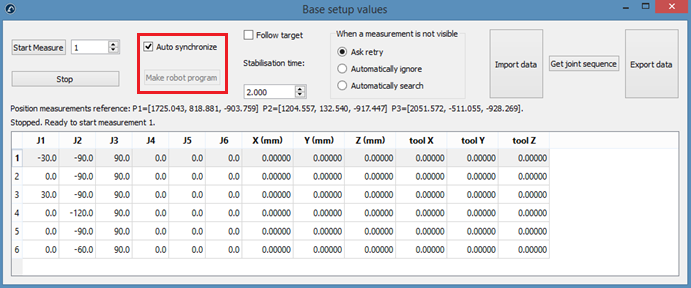
Essas medições podem ser realizadas em qualquer lugar do flange da ferramenta se você medir o mesmo ponto em todas as 6 medições. Para iniciar as medições, selecione Medir na seção Configuração da base. A janela a seguir será aberta. Em seguida, selecione Iniciar medição e o robô se moverá sequencialmente pelas medições programadas.
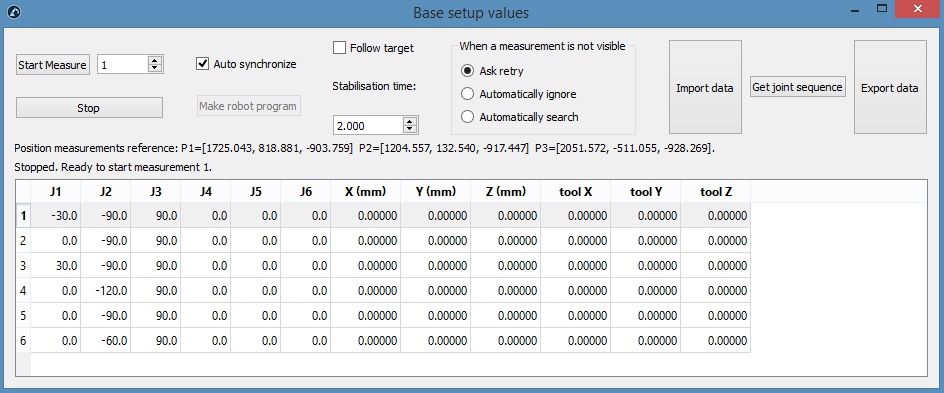
Feche a janela quando as medições estiverem concluídas e o frame de referência de medições será atualizado com relação ao frame de base do robô. Se você não tiver selecionado nenhum frame de referência, poderá adicionar uma referência (selecione Programa ➔ Adicionar Frame de Referência) e colocá-la sob a referência da base do robô (Arraste e solte na árvore de itens).
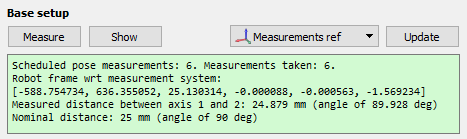
O resumo mostrará a posição e a orientação do frame de referência do robô em relação ao frame de referência da calibração ([x,y,z,w,p,r] formato em mm e radianos)
Medição da ferramenta
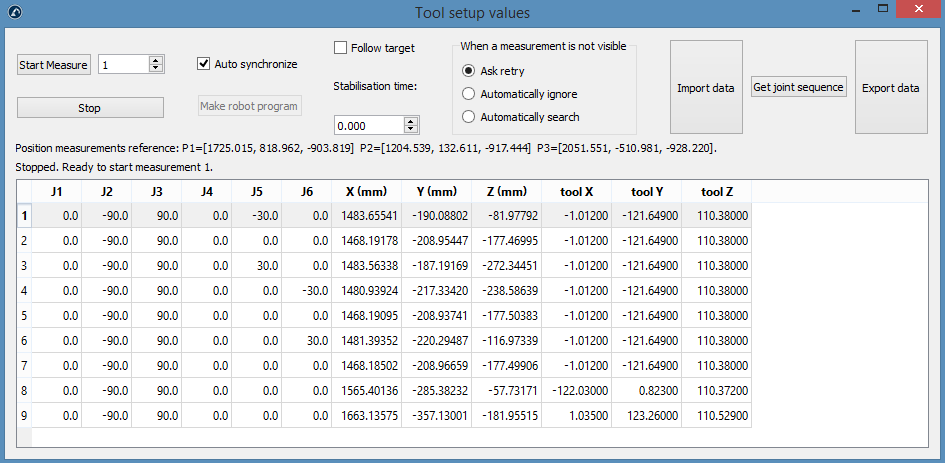
As medições de 1 a 6 podem ser realizadas em qualquer lugar do flange da ferramenta, desde que você meça o mesmo ponto para as 6 medições. Depois disso, cada TCP que você quiser medir adicionará uma medição para o mesmo TCP; nesse caso, você tem 3 TCPs, portanto, 6+3=9 medições no total. Você pode clicar duas vezes em uma medição para continuar a medir a partir dessa posição.
Como na seção anterior: selecione Medição na seção Configuração da ferramenta. A janela a seguir será aberta. Selecione Iniciar medição e o robô se moverá sequencialmente pelas medições planejadas. Clique duas vezes em uma medição para continuar a medição a partir daquela posição.
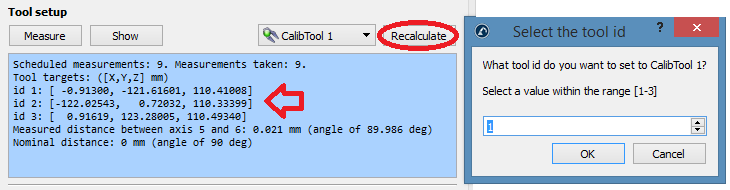
O resumo mostrará os TCPs calibrados quando o procedimento for concluído. A definição do TCP (na imagem a seguir, "CalibTool 1") será atualizada automaticamente. Se você não tiver selecionado nenhum TCP, poderá adicionar um novo (selecione "Programa ➔ Adicionar Ferramenta vazia") e selecione "Recalcular". Será exibida uma nova janela e você deverá selecionar o "id" da ferramenta, dependendo da ordem em que as medições foram feitas. Você pode repetir o mesmo procedimento para atualizar quantos TCPs forem necessários (neste caso, 3 TCPs). O ID da ferramenta será detectado automaticamente se o nome da ferramenta terminar com um número.
Calibração
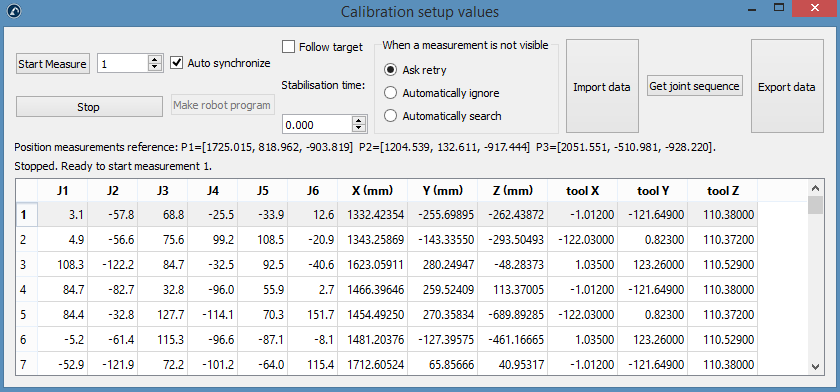
Selecione Medição na seção Calibração para abrir a janela de medições de calibração do robô. Em seguida, selecione Iniciar medição e o robô se moverá sequencialmente pelas medições planejadas. Clique duas vezes em uma medição para continuar medindo a partir daquela posição.
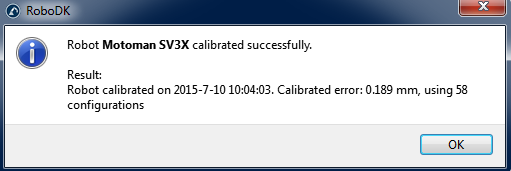
Feche a janela quando as medições forem concluídas. O robô será calibrado automaticamente e exibirá a seguinte mensagem se não houver problemas.
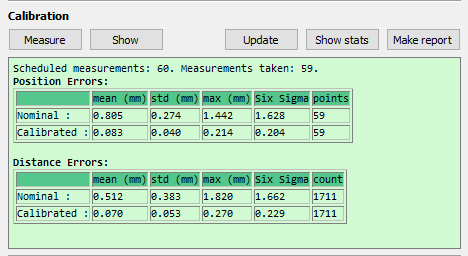
Por fim, a tela verde exibirá algumas estatísticas sobre as medições de calibração e o quanto a precisão foi melhorada para essas medições.
Validação
Você não deve validar a precisão do robô usando as mesmas medições que usou para calibrar o robô; portanto, recomenda-se fazer medições adicionais para validar a precisão (tendo um ponto de vista mais objetivo dos resultados da precisão).
O mesmo procedimento de calibração deve ser seguido para fazer as medições de validação. O resumo exibirá as estatísticas de validação. Consulte a seção de resultados a seguir para obter mais informações.