Conecte-se ao robô
O IP do robô (ou o número da porta COM para conexões RS232) é necessário para configurar corretamente a comunicação com o RoboDK. Siga estas etapas para verificar a comunicação com o robô:
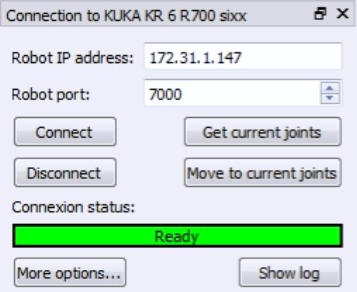
1.Selecione Conectar ➔ Conectar robô. Uma nova janela será exibida.
2.Defina o IP e a porta do robô (ou a porta COM se a conexão for via RS232).
3.Clique no botão Conectar.
4.Consulte o apêndice se surgir algum problema.
Se a conexão for bem-sucedida, você verá uma mensagem verde exibindo Pronto. A posição do robô virtual deve corresponder exatamente à posição do robô real se você selecionar Obter posição. Como alternativa, selecione Mover eixos para mover o robô para a posição atual no simulador. Você pode fechar essa janela lateral por enquanto e a conexão permanecerá ativa.