Estação RoboDK
Uma estação do RoboDK é onde a estação do ambiente virtual e as informações de calibração são armazenadas. A estação é salva como um arquivo RDK. Siga as próximas etapas para criar uma estação de robô para a calibração do robô a partir do zero (visualização do vídeo: https://youtu.be/Nkb9uDamFb4):
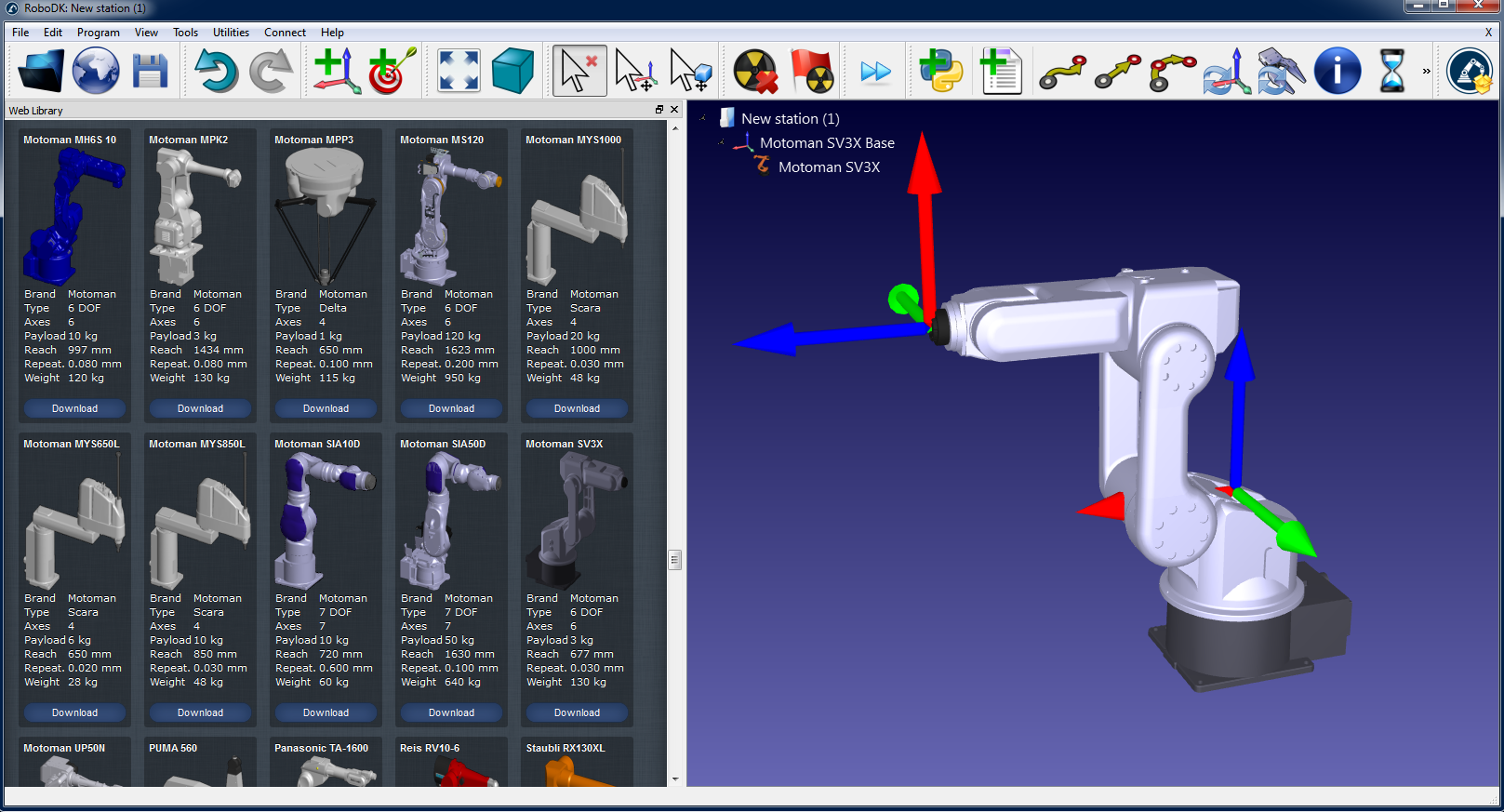
1.Selecione o robô:
a.Selecione Arquivo ➔ Abrir Biblioteca de Robôs. A biblioteca on-line será aberta em seu navegador.
b.Use os filtros para encontrar seu robô por nome, marca, carga útil, ...
c.Selecione Abrir e o robô deverá aparecer automaticamente em seu projeto RoboDK aberto.
d.Como alternativa, você pode fazer o download dos arquivos do robô (arquivo .robot) em http://robodk.com/library e abri-los com o RoboDK.
2.Prepare seu projeto para a calibração do robô:
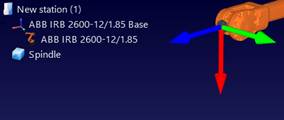
a.Adicione frames de referência selecionando Programa ➔ Adicionar Frame de Referência.
i.Um frame de "Referência de medições" deve ser adicionado com relação ao frame de base do robô.
ii.Uma "Referência do tracker" deve ser adicionada em relação à "Referência de medições" que você acabou de adicionar.
iii.Opcionalmente, é possível adicionar mais uma "Referência da ferramenta" com relação ao frame "Referência de medições" para visualizar a posição da ferramenta vista pelo tracker.
Dica 1: Arraste e solte itens na árvore para reconstruir a dependência que existe no mundo real. Por exemplo, a referência do tracker deve ser colocada em relação à "Referência de medições".
Dica 2: Mova aproximadamente qualquer frame de referência ou frame de ferramenta mantendo pressionada a tecla ALT e a tecla SHIFT+ALT, respectivamente. Como alternativa, clique duas vezes no frame de referência e insira as coordenadas corretas.
Dica 3: Renomeie qualquer objeto pressionando a tecla F2 quando o item estiver selecionado na árvore.
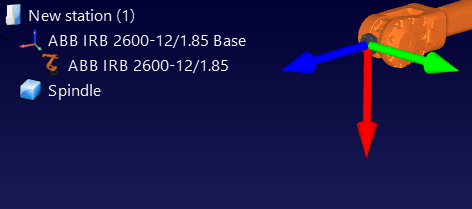
b.Add-in o objeto de ferramenta (arquivos STL, IGES e STEP são formatos suportados) e arraste e solte-o no robô (dentro da árvore de itens), o que automaticamente o objeto em uma ferramenta. Mais informações estão disponíveis aqui.
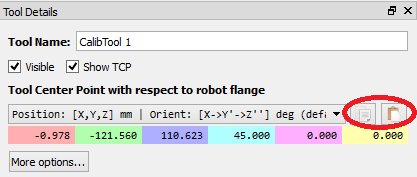
Opcional: Selecione Programa ➔ Adicionar Ferramenta (TCP) para adicionar qualquer TCP que você queira visualizar na estação (para verificar se há colisões ou outros). Para definir um valor aproximado do TCP:
i.Clique duas vezes na nova ferramenta.
ii.Defina um valor aproximado de TCP. Você pode copiar/colar os 6 valores de uma só vez usando os dois botões à direita.
iii.Recomenda-se renomear os TCPs usados para calibração com o nome "CalibTool id", em que id é o número do ponto de calibração.
c.Add-in outros arquivos CAD 3D (STL, IGES, STEP, SLD, ...) para modelar a estação virtual usando o menu Arquivo➔ Abrir... Alternativamente, arraste e solte os arquivos na janela principal do RoboDK.
Dica 1: Importe os arquivos 3D do espaço de trabalho de medição e nomeie-o como Workspace para que as medições do robô sejam geradas dentro do espaço de trabalho do tracker. Como alternativa, defina o espaço de trabalho como invisível se você não quiser restringir as medições dentro do espaço de trabalho do tracker. Mais informações estão disponíveis na próxima seção.
Dica 2: É possível selecionar CTRL+ALT+Shift+P para bloquear a exportação de arquivos 3D confidenciais que foram importados no RoboDK.
3.Adicione o módulo de calibração na estação:
a.Selecione o menu Utilitários ➔ Calibrar Robô.
b.Selecione Pontos (3 DOF)
Opcionalmente, você pode selecionar Poses (6 DOF) se tiver um laser tracker que possa fazer medições de pose e seja compatível com o RoboDK (como o laser tracker Leica T-Mac).
Em seguida, a seguinte janela será exibida.
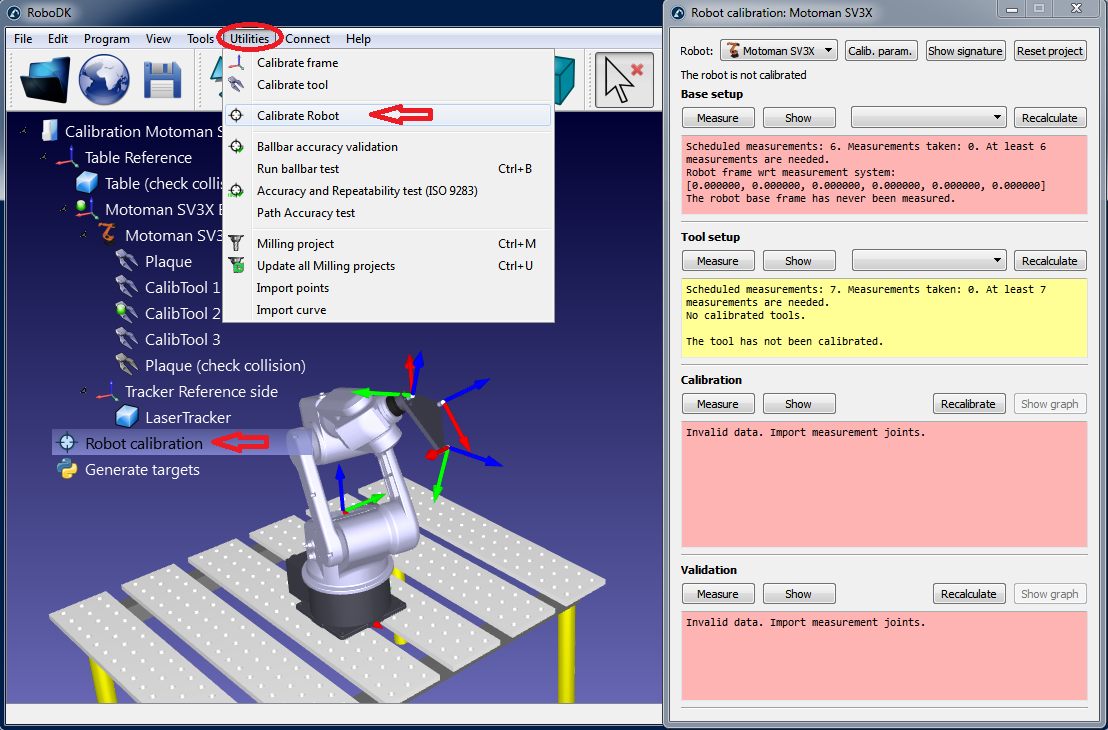
Essa janela pode ser fechada por enquanto. Você pode abri-la a qualquer momento clicando duas vezes no item da estação de calibração do robô.

4.Salve a estação.
a.Selecione Arquivo ➔ Salvar Estação.
b.Selecione uma pasta e escolha um nome de arquivo.
c.Selecione salvar. Um novo arquivo RDK será gerado (arquivo de estação do RoboDK).
Você pode recuperar as modificações da estação a qualquer momento abrindo o arquivo RDK (clique duas vezes no arquivo).
Em resumo, é importante verificar novamente os seguintes pontos:
1.A ferramenta de calibração (ponto SMR) deve ser chamada de "CalibTool 1". É altamente recomendável iniciar a calibração com apenas uma ferramenta/ponto. Se você tiver mais pontos de calibração, deverá aumentar o índice de acordo. Por exemplo, se você tiver 3 ferramentas de calibração/SMRs, deve nomeá-las "CalibTool 1", "CalibTool 2" e "CalibTool 3".
2.O frame de referência de medições depende diretamente da base do robô.
Por enquanto, você pode usar uma estimativa desse frame de referência.
3.A referência do tracker deve ser anexada diretamente à referência de medições. A referência do tracker deve ser uma posição aproximada do laser tracker em relação à referência de medições. A configuração da base ajustará corretamente a localização do tracker.
4.O projeto de calibração do robô está presente na estação e todas as medições que você planeja fazer estão livres de colisão e visíveis pelo laser tracker (selecione mostrar para cada grupo de medições).
5.Se quiser verificar automaticamente se há colisões, você deve usar a tag de nome "collision" em todos os objetos que quiser usar para verificar colisões. Recomenda-se usar uma ferramenta cerca de 25% maior do que a ferramenta calibrada para verificação de colisões para evitar colisões com segurança.