Frame de referência e frame de ferramentas
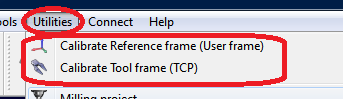
O RoboDK fornece alguns utilitários para calibrar frames de referência e frames de ferramentas. Essas ferramentas podem ser acessadas em Utilitários ➔ Calibrar Frame de referência e Utilitários ➔ Calibrar Frame de ferramenta, respectivamente.
Para calibrar um frame de referência ou um frame de ferramenta (também conhecido como frame do usuário e TCP, respectivamente), você precisa de algumas configurações do robô que toquem 3 ou mais pontos; essas configurações do robô podem ser valores de eixos ou coordenadas cartesianas (com dados de orientação em alguns casos). Recomenda-se usar os valores dos eixos em vez das coordenadas cartesianas, pois é mais fácil verificar a configuração real do robô no RoboDK (copiando e colando os eixos do robô na tela principal do RoboDK).
Calibração de ferramentas
Selecione Utilitários➔ Calibrar ferramenta para calibrar o TCP usando o RoboDK. Você pode usar quantos pontos desejar, usando diferentes orientações. É melhor usar mais pontos e mudanças de orientação maiores, pois obteremos uma estimativa melhor do TCP, bem como uma boa estimativa do erro do TCP.
As duas opções a seguir estão disponíveis para calibrar um TCP:
●Ao tocar em um ponto estacionário com o TCP com diferentes orientações.
●Ao tocar em um plano com o TCP (como um apalpador).
Recomenda-se calibrar tocando em uma referência plana se tivermos que calibrar um apalpador ou um fuso. Esse método é mais estável contra erros do usuário.
Se o TCP for esférico, o centro da esfera será calculado como o novo TCP (não é necessário fornecer o diâmetro da esfera).
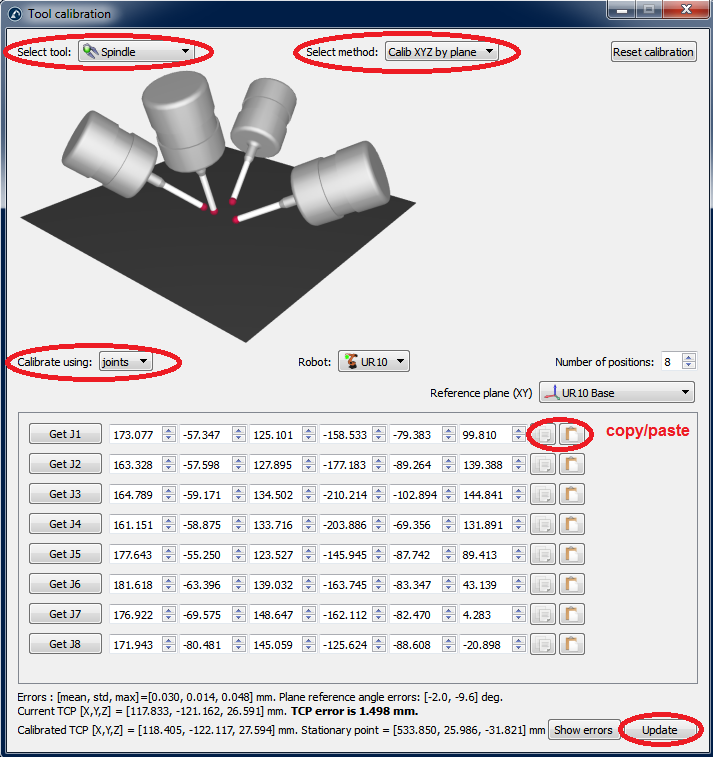
As etapas a seguir devem ser seguidas para calibrar o TCP com um plano (como visto na figura):
1.Selecione a ferramenta que precisa ser calibrada.
2.Selecione o método de calibração➔ "Calib por plano XYZ ".
3.Selecione calibrar usando "eixos".
4.Selecione o robô que está sendo usado.
5.Selecione o número de configurações que você usará para a calibração do TCP (recomenda-se usar 8 configurações ou mais).
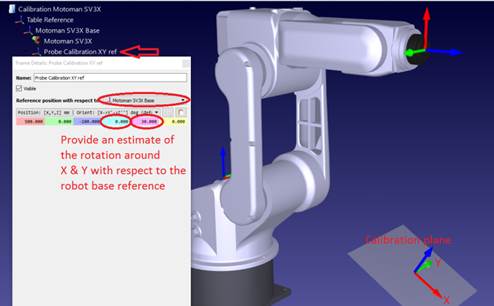
6.Selecione uma estimativa do plano de referência. Se o plano de referência não for paralelo ao plano XY do robô (da referência do robô), você deve adicionar uma estimativa desse plano de referência dentro de± 20 graus. A posição desse plano não é importante, apenas a orientação.
7.Você pode começar a preencher a tabela de valores de eixo. Você pode preenchê-la manualmente ou copiando/colando com os botões (como mostrado na imagem). Você também pode usar o botão "Obter Jx" para obter os valores atuais das articulações do robô no simulador. Se estiver obtendo as articulações de um robô real conectado ao robô, você deve primeiro selecionar "Obter pos. atual dos eixos" no menu de conexão do robô (consulte a imagem anexa ou o apêndice para obter mais informações sobre como conectar um robô ao RoboDK). É altamente recomendável que você mantenha uma cópia separada das articulações usadas para calibração (como um arquivo de texto, por exemplo).
8.Quando a tabela estiver preenchida, você verá os novos valores de TCP (X,Y,Z) como " TCP calibrado ", no final da janela. Você pode selecionar "Atualizar" e o novo TCP será atualizado na estação RoboDK. A orientação da sonda não pode ser encontrada usando esse método.
9.Você pode selecionar "Exibir erros" e verá o erro de cada configuração em relação ao TCP calculado (que é a média de todas as configurações). Você pode excluir uma configuração se ela tiver um erro maior do que as outras.
10.Você deve atualizar manualmente os valores no controlador do robô real (somente X,Y,Z). Se esse TCP for usado em um programa gerado pelo RoboDK, não será necessário atualizar os valores no controlador do robô.
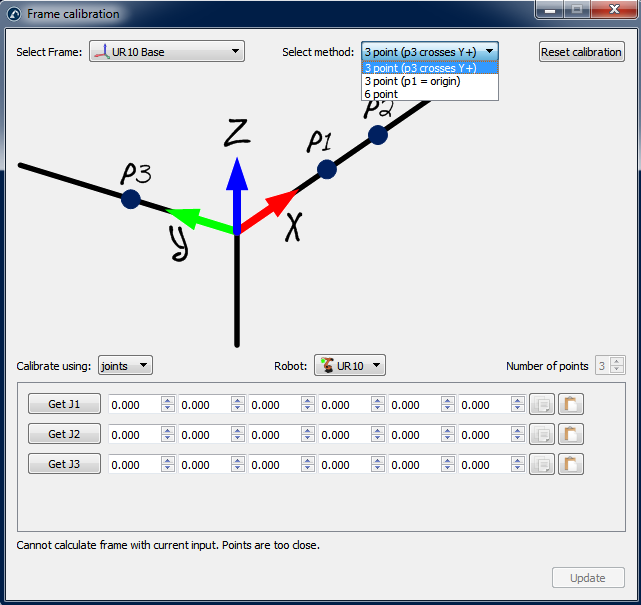
Calibração do frame de referência
Selecione Utilitários➔ Calibrar Referência para calibrar um frame de referência. É possível definir um frame de referência usando diferentes métodos. No exemplo da figura, um frame de referência é definido por três pontos: os pontos 1 e 2 definem a direção do eixo X e o ponto 3 define o eixo Y positivo.