Introdução
Os robôs industriais têm alta repetibilidade, mas não são precisos, portanto, a precisão de um robô industrial pode ser aprimorada por meio da calibração do robô. A precisão nominal de um robô depende da marca e do modelo do robô. Com a calibração do robô, você pode aumentar a precisão do robô em um fator de 2 a 10.
Com o RoboDK, você pode calibrar robôs de 6 eixos e obter precisão de até 0,050 mm para robôs pequenos e 0,150 mm para robôs de tamanho médio. A precisão que você pode obter após a calibração depende muito do modelo do robô e da sua configuração. Com o RoboDK, você não pode calibrar robôs de 5 ou 7 eixos.
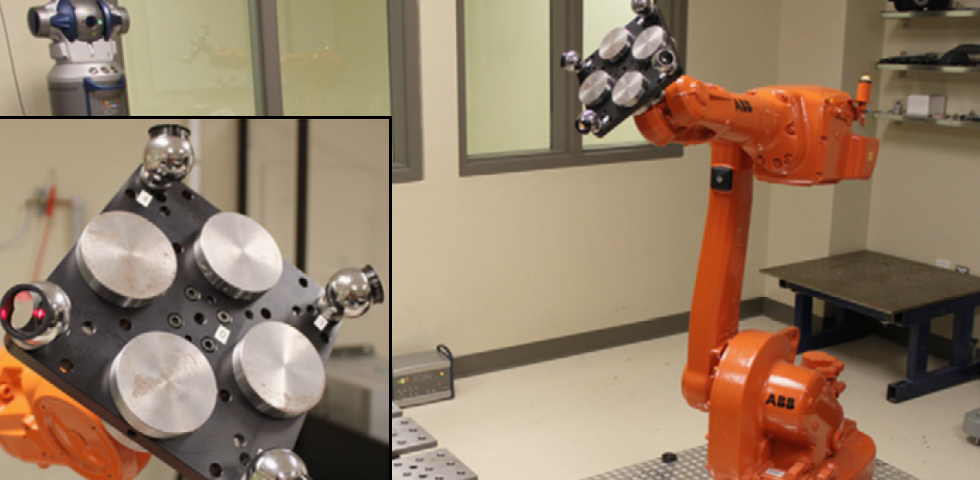
É necessário um sistema de medição para calibrar um robô. O RoboDK pode ser usado para calibrar os robôs, bem como para gerar programas de robôs precisos (isso inclui filtrar os programas e usar o mecanismo de programação off-line do RoboDK). O RoboDK também pode ser usado para testar a precisão do robô antes e depois da calibração por meio do teste de ballbar ou da fresagem do robô.
A calibração do robô pode melhorar consideravelmente a precisão dos robôs programados off-line, também conhecida como OLP (Off-Line Programming, programação fora da linha). Um robô calibrado tem maior precisão de posicionamento absoluto e relativo do que um robô não calibrado.