Medição da ferramenta
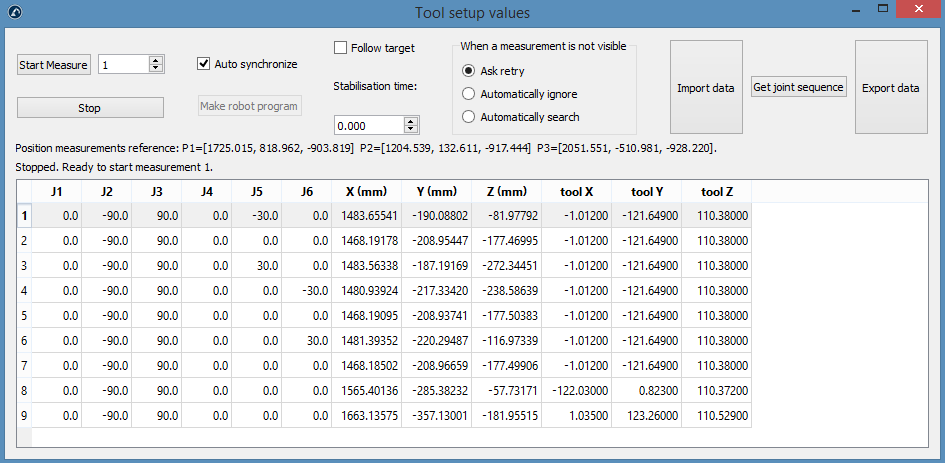
As medições de 1 a 6 podem ser realizadas em qualquer lugar do flange da ferramenta, desde que você meça o mesmo ponto para as 6 medições. Depois disso, cada TCP que você quiser medir adicionará uma medição para o mesmo TCP; nesse caso, você tem 3 TCPs, portanto, 6+3=9 medições no total. Você pode clicar duas vezes em uma medição para continuar a medir a partir dessa posição.
Como na seção anterior: selecione Medição na seção Configuração da ferramenta. A janela a seguir será aberta. Selecione Iniciar medição e o robô se moverá sequencialmente pelas medições planejadas. Clique duas vezes em uma medição para continuar a medição a partir daquela posição.
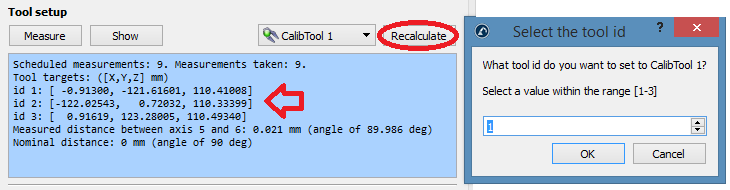
O resumo mostrará os TCPs calibrados quando o procedimento for concluído. A definição do TCP (na imagem a seguir, "CalibTool 1") será atualizada automaticamente. Se você não tiver selecionado nenhum TCP, poderá adicionar um novo (selecione "Programa ➔ Adicionar Ferramenta vazia") e selecione "Recalcular". Será exibida uma nova janela e você deverá selecionar o "id" da ferramenta, dependendo da ordem em que as medições foram feitas. Você pode repetir o mesmo procedimento para atualizar quantos TCPs forem necessários (neste caso, 3 TCPs). O ID da ferramenta será detectado automaticamente se o nome da ferramenta terminar com um número.