Medição da base
Essas medições podem ser realizadas em qualquer lugar do flange da ferramenta se você medir o mesmo ponto em todas as 6 medições. Para iniciar as medições, selecione Medir na seção Configuração da base. A janela a seguir será aberta. Em seguida, selecione Iniciar medição e o robô se moverá sequencialmente pelas medições programadas.
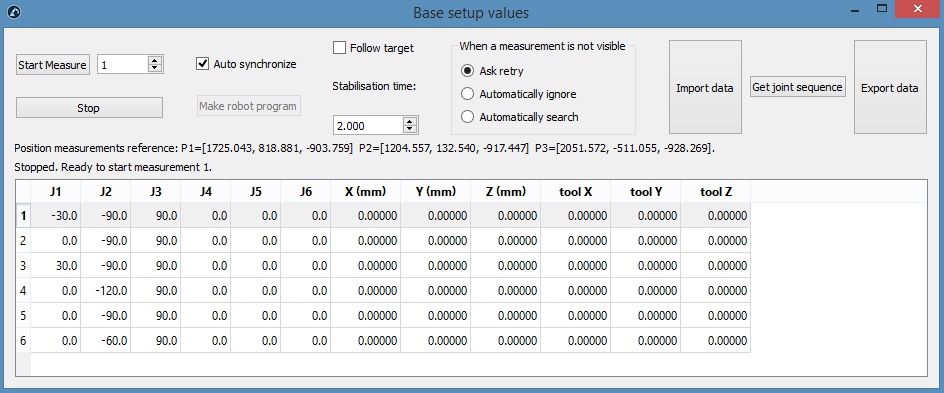
Feche a janela quando as medições estiverem concluídas e o frame de referência de medições será atualizado com relação ao frame de base do robô. Se você não tiver selecionado nenhum frame de referência, poderá adicionar uma referência (selecione Programa ➔ Adicionar Frame de Referência) e colocá-la sob a referência da base do robô (Arraste e solte na árvore de itens).
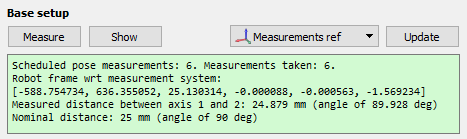
O resumo mostrará a posição e a orientação do frame de referência do robô em relação ao frame de referência da calibração ([x,y,z,w,p,r] formato em mm e radianos)