Medição dos pontos de referência
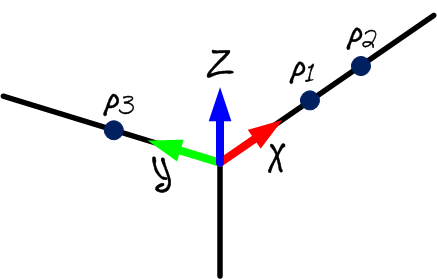
Recomenda-se medir um frame de referência de calibração se você estiver planejando mover o laser tracker durante a calibração. A referência de calibração deve ser anexada à base do robô, o que será útil se você quiser mover o tracker durante a calibração ou comparar duas calibrações do robô. A estrutura de referência de calibração deve ser definida por 3 pontos/ninhos tangíveis.
Você pode pular esta etapa se não for mover o tracker em relação ao robô ou se não precisar recuperar a posição inicial do eixo 1. Nesse caso, será usada a referência do laser tracker.
Você deve seguir essas etapas sempre que o laser tracker for movido:
1.Selecione Conectar➔ Conectar Laser Tracker Faro. Ou o tracker correspondente que você possui.
2.Defina o IP do laser tracker e selecione conectar (se o laser tracker não estiver conectado).
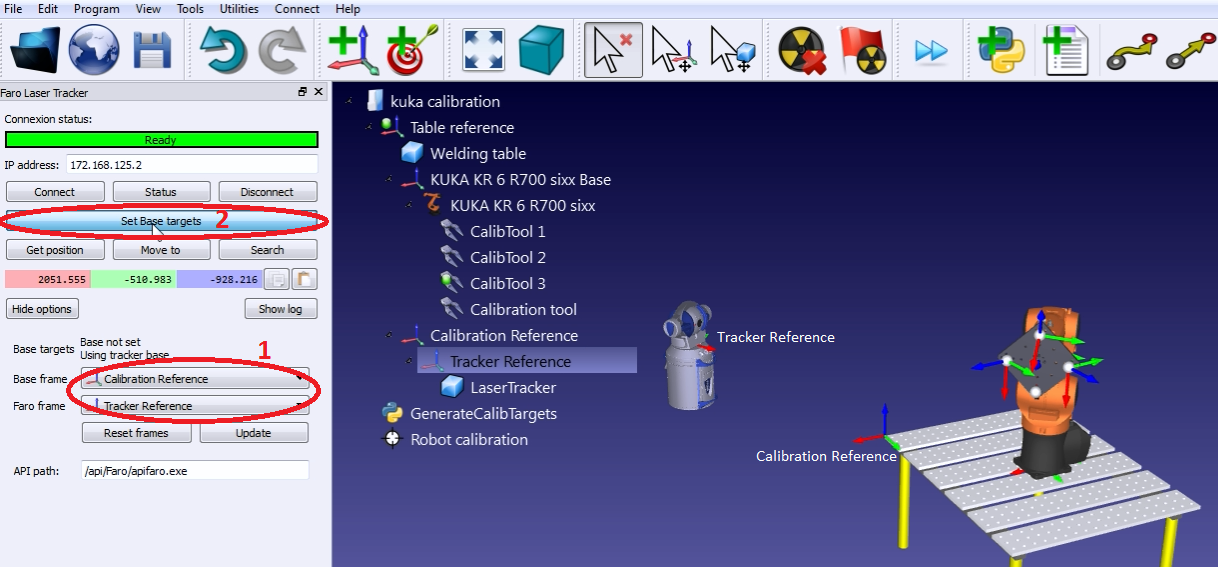
3.Defina a referência de calibração e a referência do tracker conforme mostrado na imagem. A referência de calibração também é conhecida como "Referência de medições".
4.Selecione Definir pontos de Base.
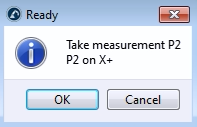
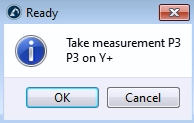
O RoboDK guiará o usuário com os menus mostrados na próxima imagem. A posição do laser tracker será atualizada automaticamente em relação à referência de calibração quando o procedimento for concluído.