Referência do eixo 6
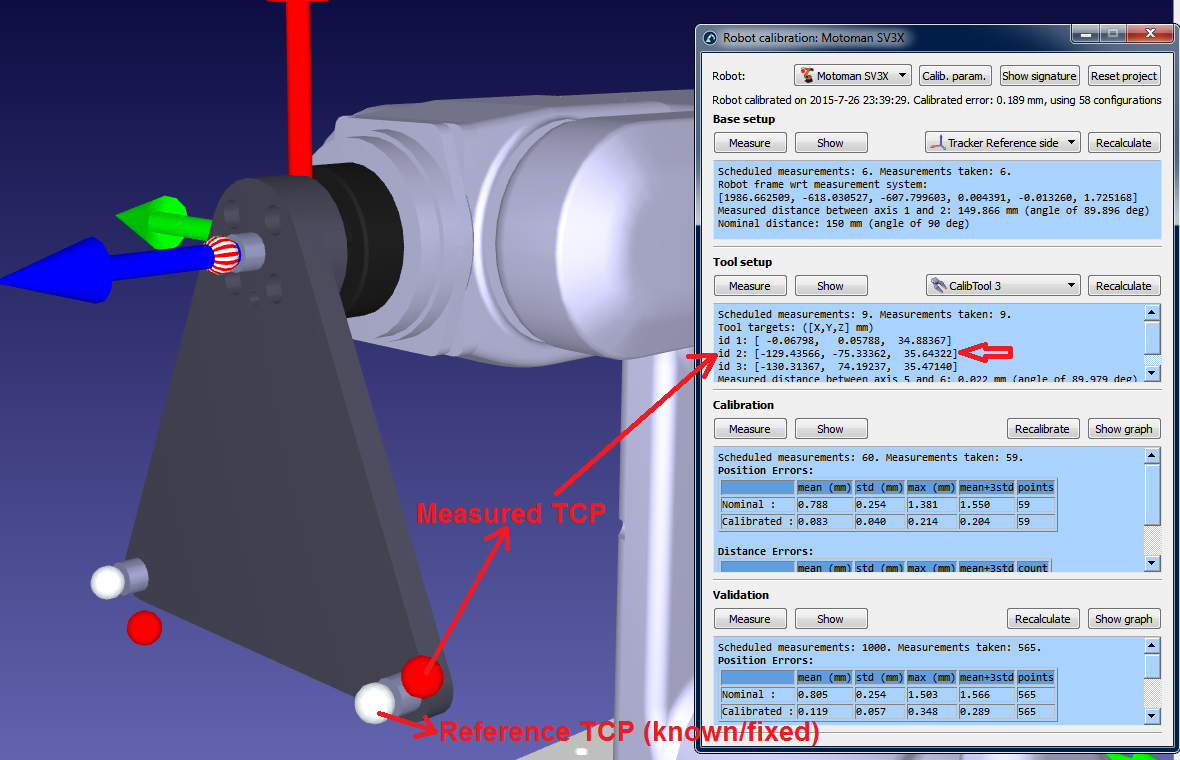
Você deve usar um ponto de referência para definir corretamente a posição "inicial" do eixo 6. O desvio de ângulo será a rotação em torno do eixo Z do flange da ferramenta necessária para melhor ajustar o TCP medido (X,Y,Z) com a referência TCP conhecida. O TCP medido (veja a imagem a seguir) é um dos TCPs que foram medidos na etapa dois do procedimento de calibração. O TCP de referência é uma referência conhecida que corresponde a um dos TCP da ferramenta de calibração que está sendo usada.
Idealmente, o TCP de referência deve ser medido pela CMM em relação ao flange da ferramenta (uma réplica do flange da ferramenta do robô seria melhor). Como alternativa, você pode usar um novo robô para medir (etapa dois do procedimento de calibração) o TCP pela primeira vez e usar um TCP medido como referência. É importante usar um pino de cavilha e/ou a referência apropriada do flange da ferramenta para garantir que o efetor final seja sempre colocado na mesma posição.