Como usar os drivers de robôs
Esta seção mostra como se conectar a um robô real do RoboDK usando drivers de robô e realizar algumas operações simples.
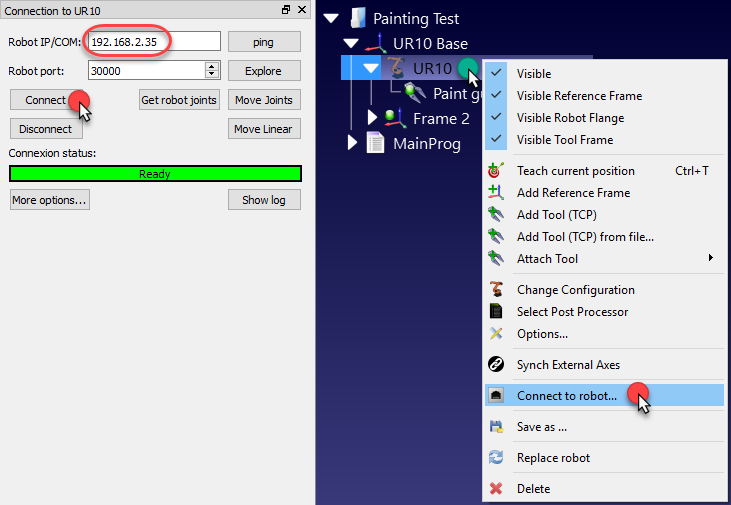
1.Clique com o botão direito do mouse em um robô
2.Selecione
3.Digite o IP do robô
4.Selecione Conectar
Se a conexão for bem-sucedida, aparecerá uma mensagem verde exibindo Pronto, conforme mostrado na imagem a seguir.
Usando a GUI
Um programa de robô que tenha sido criado usando a interface gráfica do usuário (GUI) pode ser executado no robô seguindo estas etapas.
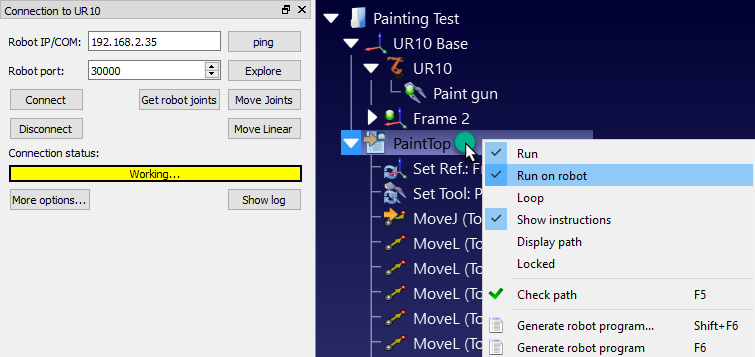
1.Clique com o botão direito do mouse em um programa 
2.Marque a opção Executar no robô
3.Clique duas vezes no programa para iniciá-lo
O programa deve iniciar no robô real e o simulador seguirá os movimentos do robô. O status da conexão exibirá Trabalhando... em amarelo quando o robô estiver ocupado.
Usando a API
É possível controlar o movimento de um robô a partir da API do RoboDK, por exemplo, para programar um robô a partir de um programa Python ou de um aplicativo C#.
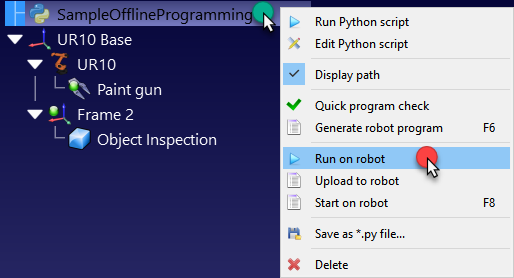
A opção Executar no robô é gerenciada automaticamente quando um programa Python é executado a partir do RoboDK. Siga estas etapas para executar um programa Python no robô:
1.Clique com o botão direito do mouse em um programa
2.Selecione
O programa deve começar a ser executado no robô e o status da conexão do robô será atualizado de acordo.
Se o programa for executado fora da GUI do RoboDK (para fins de depuração ou se estivermos usando a API do RoboDK para C#, por exemplo), podemos definir o RunMode usando RDK.setRunMode para RUNMODE_RUN_ROBOT. Isso forçará o programa a ser executado no robô. Também é possível estabelecer a conexão usando robot.Connect().
O código a seguir mostra um breve exemplo para estabelecer uma conexão com o robô diretamente da API:
# Iniciar a API do RoboDK
RDK= Robolink()
robô= RDK.Item('',ITEM_TYPE_ROBOT)
# Conectar-se ao robô usando os parâmetros de conexão padrão
success= robot.Connect()
status, status_msg= robot.ConnectedState()
se status != ROBOTCOM_READY:
# Parar se a conexão não for bem-sucedida
raise Exception("Failed to connect: "+ status_msg)
# Definir para executar os comandos do robô no robô
RDK.setRunMode(RUNMODE_RUN_ROBOT)
# Observação: Isso é definido automaticamente se usarmos
# robot.Connect() por meio da API
# Mova o robô:
robot.MoveJ([10,20,30,40,50,60])
prog= RDK.Item('MainProgram', ITEM_TYPE_PROGRAM)
prog.setRunType(PROGRAM_RUN_ON_ROBOT) # Define a opção de execução no robô
# Defina PROGRAM_RUN_ON_SIMULATOR para ser executado somente no simulador
prog.RunProgram()
while prog.Busy()== 1:
pausa(0,1)
print("Program done"