Personalize os drivers de robôs
Os drivers do robô estão na pasta /RoboDK/api/Robot/ por padrão. O RoboDK se vincula a um driver específico nas configurações de conexão do robô:
1.Clique com o botão direito do mouse em um robô
2.Selecione
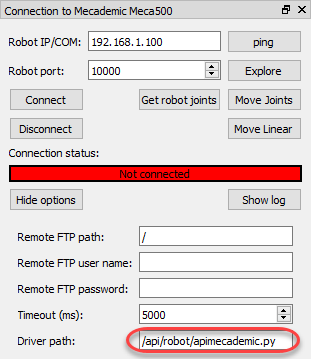
3.Selecione Mais opções...
4.Localize ou insira o caminho do caminho do driver na seção Caminho do driver
Um driver de robô é um aplicativo de console autônomo. Os drivers do robô podem ser desenvolvidos usando qualquer plataforma de programação, por exemplo, podem ser um módulo Python (formato PY) ou qualquer programa executável criado em qualquer ambiente de desenvolvimento.
O driver do robô permite a comunicação com um robô por meio da linha de comando. Os mesmos comandos que podem ser executados manualmente também são usados pelo RoboDK para acionar o robô a partir do PC. Cada driver de robô pode ser executado no modo console para testá-lo.
Um exemplo de driver Python (apimecademic.py) com seu código-fonte para controlar os robôs Mecademic está disponível em C:/RoboDK/bin/robot/.
Clique duas vezes no arquivo apimecademic.py para executar o módulo no modo console (o Python deve estar instalado). O driver aguardará novos comandos. Por exemplo, podemos digitar o seguinte comando para nos conectarmos ao robô, fornecendo um IP e uma porta de comunicação:
CONNECT 192.168.100.1 10000
Se a conexão for bem-sucedida, veremos uma mensagem SMS:Ready. Em seguida, podemos digitar o seguinte comando para recuperar as articulações atuais do robô:
CJNT
Também podemos digitar outros comandos, como MOVJ, MOVL ou SETTOOL, para mover o robô ou atualizar o TCP:
MOVJ 10 20 30 40 50 60
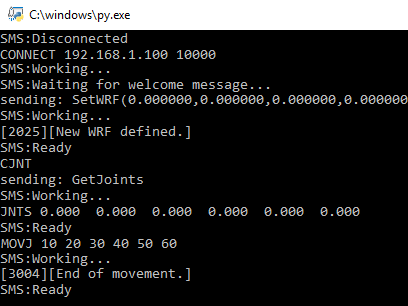
Alguns robôs permitem o monitoramento da posição do eixo em tempo real. Nesse caso, é possível fornecer feedback da posição do eixo à medida que o robô se move, enviando o comando JNTS_MOVING. Quando o driver for executado a partir do RoboDK, o robô virtual seguirá o movimento do robô real em tempo real. Um novo comando não será processado até que a mensagem Ready seja enviada.
A interação com o console e a conexão com o robô são gerenciadas por um módulo Python para o driver Mecademic. A interação com o console deve ser a mesma para todos os robôs, conforme descrito nesta seção. No entanto, a interação com cada robô depende do fabricante do robô; nesse caso, consultamos o manual de programação do Meca 500 para enviar os comandos apropriados. Esses comandos permitem mover e monitorar o robô Meca 500.