Solução de problemas
A configuração do driver do robô pode não ser tão simples quanto gerar programas off-line (Programação off-line). Se a conexão não funcionar, esta seção fornece algumas dicas para ajudá-lo a encontrar a origem dos problemas.
1.Certifique-se de que o IP do robô esteja correto e acessível: Selecione o botão de ping no menu de conexão do robô (ou faça ping no robô por meio da linha de comando) para garantir que o robô e o computador estejam na mesma rede.
2.Defina um IP estático para o computador se o robô e o computador não estiverem na mesma rede.
3.Se você estiver usando o Windows: Certifique-se de que o Firewall do Windows esteja desativado para evitar o bloqueio de qualquer conexão.
4.Certifique-se de que a porta de comunicação seja apropriada e esteja disponível no lado do robô.
5.Certifique-se de que as instruções apropriadas sejam seguidas no controlador do robô, dependendo do modelo do controlador.
6.Clique duas vezes em Desconectar na janela de conexão do Robô para forçar a parada do driver e, em seguida, selecione Conectar novamente para tentar uma nova conexão.
Teste de ping
Um teste de ping testará a capacidade de alcance de um robô em uma rede IP (Internet Protocol).
Siga estas etapas para realizar um teste de ping no Windows:
1.Abra uma nova janela de console selecionando
2.Digite cmd e selecione OK
3.Digite ping IP, onde o IP deve ser o IP do seu robô.) Exemplo:
ping 192.168.125.2
Devemos ver uma resposta semelhante à imagem com 0% de perda de sinal
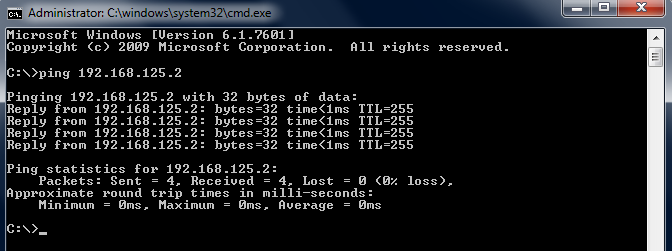
Se não houver comunicação, devemos verificar se o IP do robô e o PC estão na mesma rede local (LAN). Pode ser necessário desativar o Firewall do Windows ou adicionar uma regra para permitir a comunicação.
Definir um IP estático
Siga estas etapas para alterar o IP de um computador:
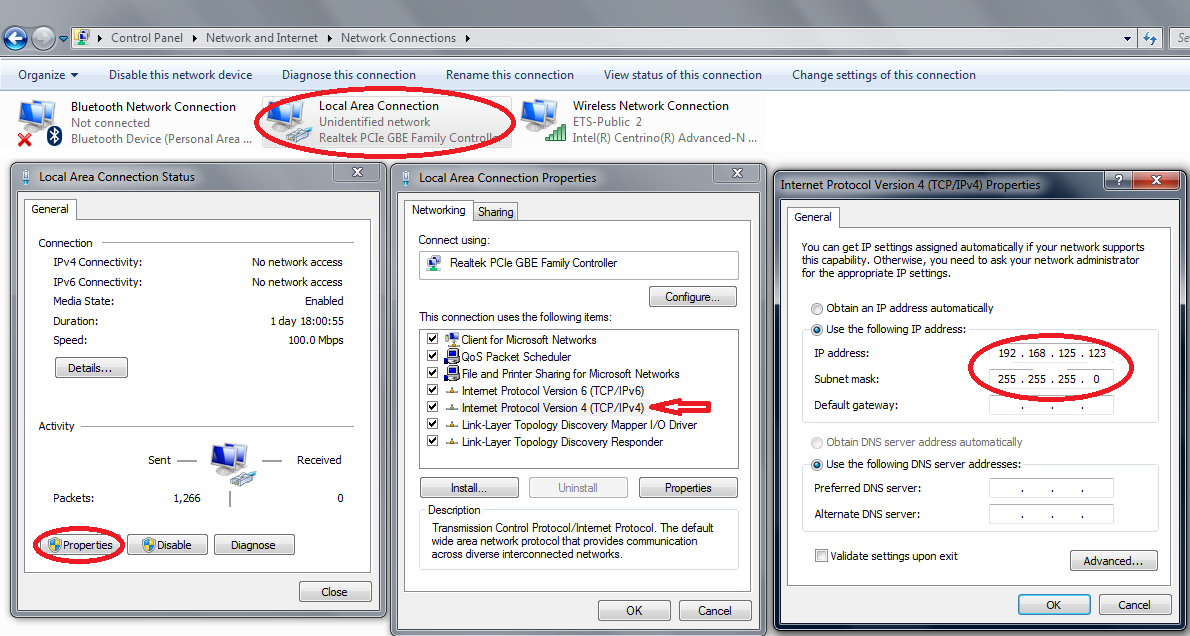
1.Selecione Iniciar ➔ Painel de Controle ➔ Rede e Internet➔ Conexões de rede
2.Clique duas vezes na placa de conexão de área local
3.Selecione Propriedades.
4.Selecione Protocolo de IP Versão 4 (TCP/IPv4)
5.Selecionar propriedades
6.Digite o IP do computador de acordo com o IP do robô e uma máscara de sub-rede.