Configuração preferida
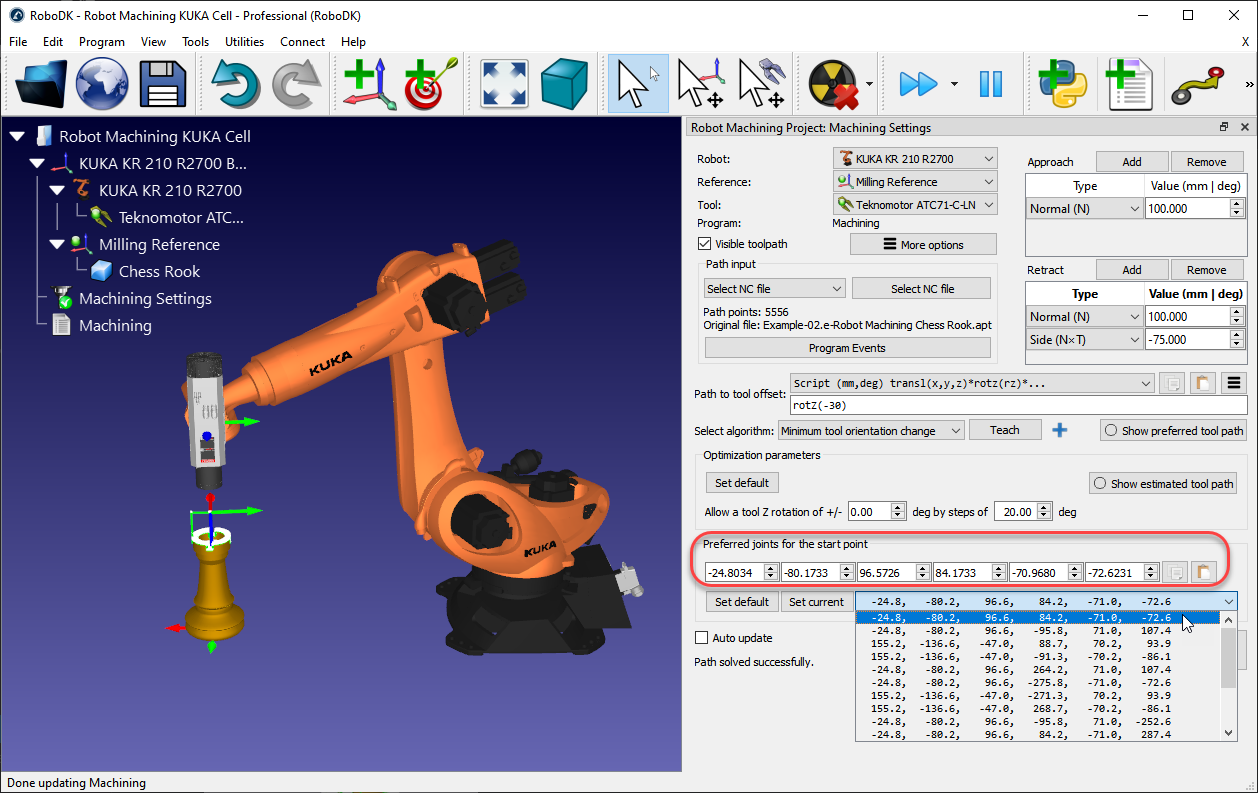
O RoboDK seleciona automaticamente a configuração inicial que está mais próxima das posições de eixo iniciais preferidas. A partir desse ponto, o robô seguirá movimentos lineares, de modo que a configuração do robô não será alterada.
Um menu suspenso exibirá todas as soluções possíveis para iniciar o programa. Se necessário, selecione a configuração preferida da junta do robô e selecione Atualizar para recalcular o programa.
Dica: essa opção permite que você crie um programa com uma configuração específica, como non-flip, cotovelo para cima e bandeiras frontais. Isso também é particularmente útil se você precisar desenrolar previamente um eixo de várias voltas, como a eixo 6, antes da trajetória. Esse eixo será girado durante a trajetória sem atingir seu limite, permitindo que essa trajetória seja feita inteiramente de uma só vez.