Configuração para usinagem
Esta seção mostra como preparar um projeto simples do RoboDK, off-line, para a usinagem com robô. A célula de usinagem com robô deve ter pelo menos um robô, uma ferramenta (EOAT) e um frame de referência (também conhecido como sistema de coordenadas, referência de peça ou datum). Para obter mais informações sobre a construção de uma nova estação no RoboDK, consulte a seção de introdução.
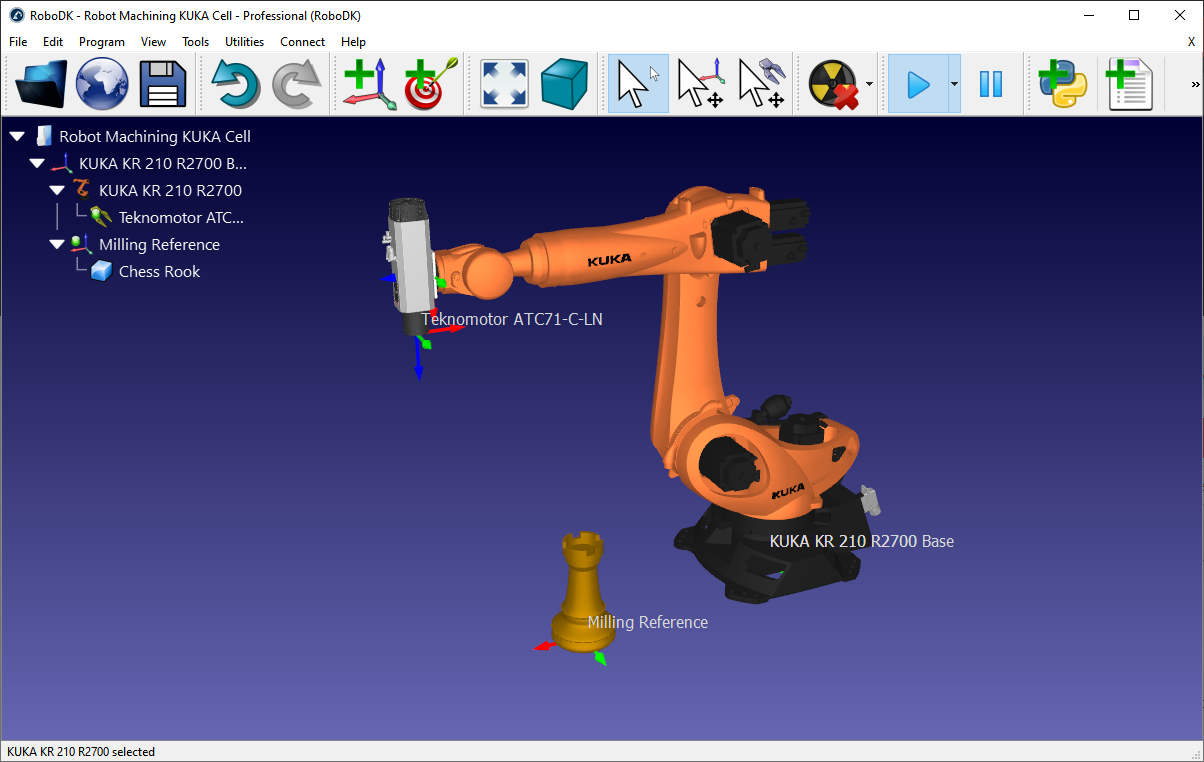
As etapas a seguir mostram como preparar uma configuração de usinagem com robô com um robô KUKA KR210 e um fuso de fresagem Teknomotor (esse exemplo está disponível na biblioteca como Sample-New-Project.rdk).
1-Selecione um robô:
a.Selecione Arquivo ➔
b.Use os filtros para encontrar seu robô por marca, carga útil, ...
Por exemplo, selecione o KUKA KR210 R2700 (210 kg de carga útil, 2,7 m de alcance).
c.Selecione Download e o robô deverá aparecer automaticamente na tela principal.
2-Selecione uma ferramenta:
a.Na mesma biblioteca on-line, selecione Reset para remover os filtros e filtrar por Tipo ➔ Ferramenta.
b.Selecione Download para carregar uma ferramenta Spindle, como o spindle ATC71-C-LN da Teknomotor.
c.O fuso será automaticamente acoplado ao robô.
d.Feche a janela Biblioteca on-line.
3-Add-in um frame de referência:
a.Selecione a estrutura da base do robô (denominada KUKA KR210 R2700 Base).
b.Selecione Programa ➔
c.Clique duas vezes na referência e insira as coordenadas:
XYZABC = [1500,1000,500,0,0,0] (mm-deg)
d.Renomeie o novo frame de referência para Milling Reference, digitando um novo nome ou selecionando F2.
4-Add-in o objeto que você usará para a usinagem com robô (opcional):
a.Selecione Arquivo ➔
b.Selecione um objeto chamado Object Chess Rook.sld na biblioteca do RoboDK:
C:/RoboDK/Library
c.Arraste e solte o objeto na Referência de Fresagem se ele não tiver sido colocado lá automaticamente (dentro da árvore de estações)
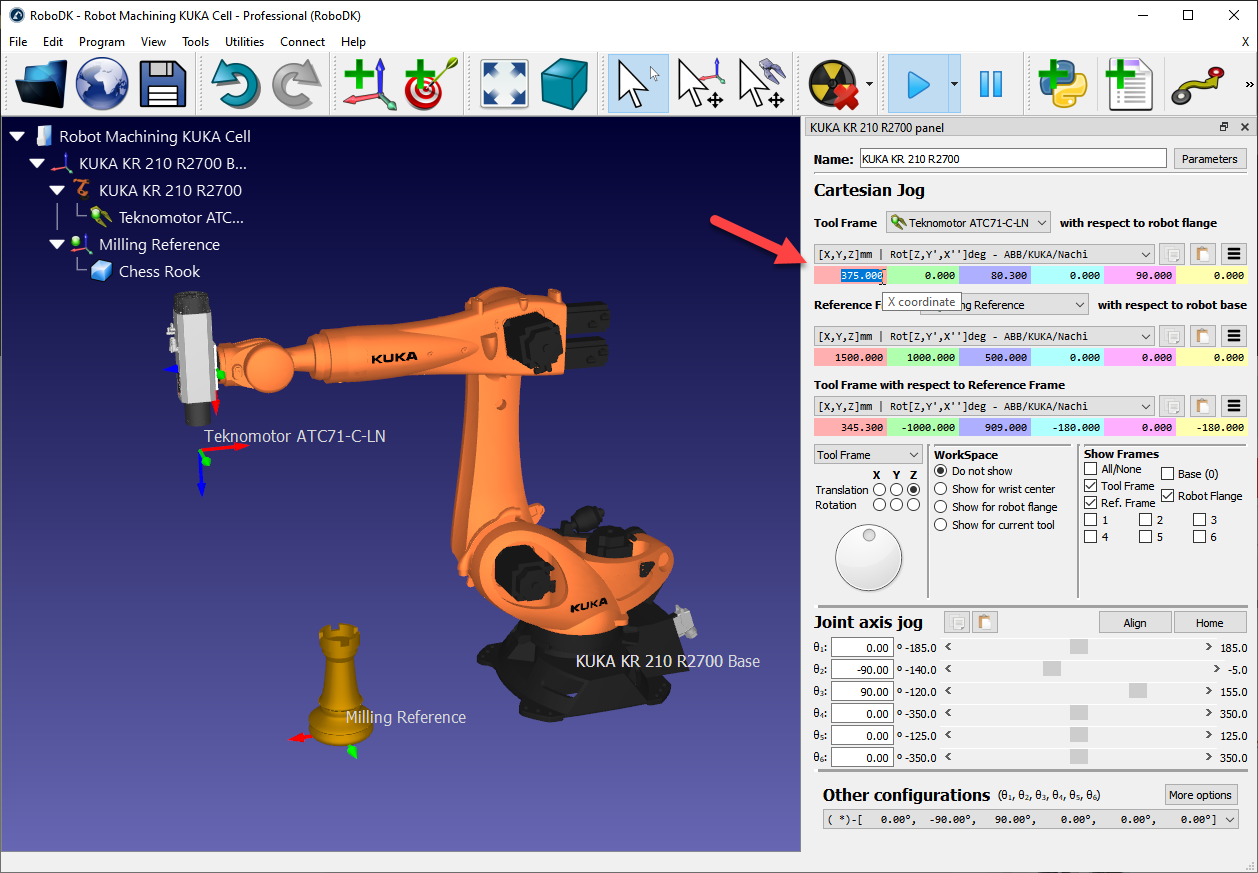
5-Clique duas vezes no robô para ver o painel do robô (opcional). O painel do robô exibe a ferramenta ativa e o frame de referência ativo. Ao selecionar e atualizar a ferramenta e o frame de referência, devemos ver as mesmas coordenadas visíveis no controlador do robô. Por padrão, o fuso do Teknomotor tem o TCP na raiz do suporte da ferramenta. A ferramenta (TCP) terá um determinado comprimento. Neste exemplo, atualizaremos o TCP para representar o comprimento do cortador da ferramenta:
a.Atualize a coordenada X da ferramenta (TCP) para 375 mm. Você verá o TCP se mover ao longo do eixo.
b.(opcional) Você também pode criar uma segunda ferramenta e definir um TCP relativo em relação à primeira, adicionando uma translação ao longo do eixo Z.
c.Feche a janela do painel do robô.