O robô segura o objeto
É possível programar um robô quando ele segura o objeto/caminho de ferramenta com a ferramenta com o robô enquanto a operação de manufatura ocorre. Isso é útil para aplicações de distribuição de cola ou polimento, por exemplo. Esse tipo de programação de robôs também é conhecido como TCP remoto.
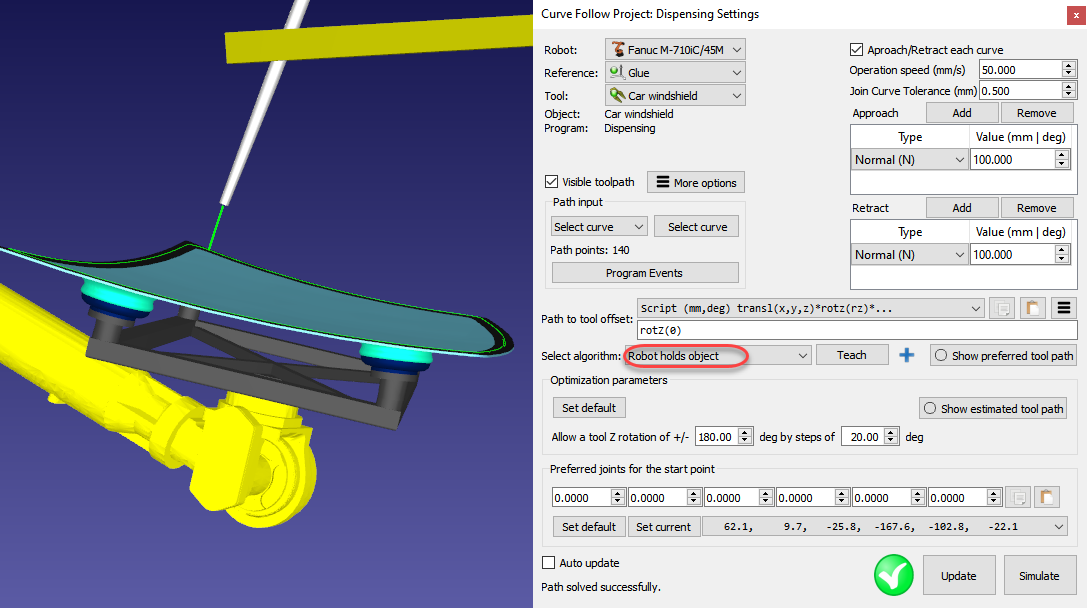
Selecione Robô segurando o objeto no menu suspenso Selecionar algoritmo para posicionar corretamente A trajetória da ferramenta na referência TCP. As outras configurações são as mesmas de um projeto de usinagem com uma orientação constante da ferramenta.
Importante: É altamente recomendável que os pontos do percurso da ferramenta estejam próximos uns dos outros se a orientação da ferramenta for alterada.
Vídeo: Este exemplo mostra uma aplicação de distribuição de cola usando um robô Fanuc: https://www.youtube.com/watch?v=YrepmoQtNnA.
Mais informações estão disponíveis na seção Add-in do RoboDK para o Autodesk Fusion.