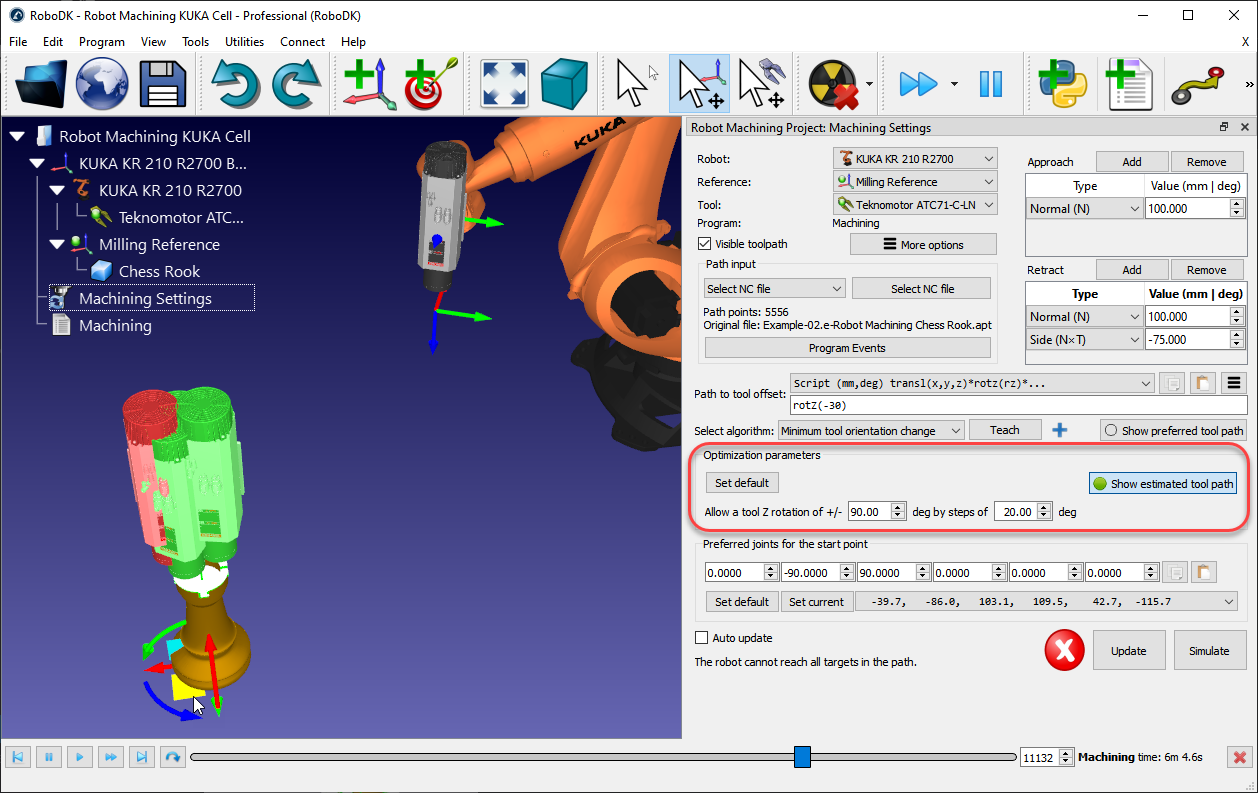
Dada uma orientação preferencial da ferramenta, o robô pode ter certa liberdade para girar em torno do eixo Z da ferramenta. Isso permite que o robô resolva o programa evitando as singularidades do robô, os limites das juntas e garantindo que todos os pontos sejam alcançáveis. Por padrão, o RoboDK permite que a ferramenta gire até +/-180 graus em torno do eixo TCP em incrementos de 20 graus.
Recomenda-se restringir essa rotação dependendo do aplicativo. Por exemplo, é possível inserir +/-90 graus para restringir a rotação permitida pela metade. Diminuir esse parâmetro também reduzirá o tempo de processamento para obter o programa.
Dica: Selecione Mostrar trajetória estimada para ver os pontos alcançáveis (em verde) e os pontos inalcançáveis (em vermelho). Os pontos alcançáveis podem ser girados em relação ao caminho de ferramenta preferido para tornar os alvos alcançáveis pelo robô.
Se alguns pontos do caminho não puderem ser alcançados, é recomendável girar o frame de referência ou ser mais permissivo com a rotação Z da ferramenta. O frame de referência pode ser movido mantendo-se pressionada a tecla Alt e arrastando o sistema de coordenadas para melhor ajustar a peça dentro do espaço de trabalho do robô.
Observação: O percurso estimado da ferramenta será exibido quando o frame de referência ou o TCP for modificado (se a opção Atualização automática estiver marcada). Isso pode orientá-lo a encontrar o local ideal para a operação de usinagem com robô.
Dica: valores de passo menores permitem uma reorientação mais gradual da ferramenta quando ela atravessa uma singularidade. Por outro lado, pode levar mais tempo para calcular o percurso da ferramenta.
Observação: Defina a rotação permitida em torno de Z como 0 graus para restringir totalmente a ferramenta de acordo com a orientação preferida. Para aplicações simples em que o robô está trabalhando longe de singularidades ou limites de eixo, você também pode definir essa rotação como 0 graus. Isso é útil para grandes aplicações de fresagem 3D em que a ferramenta deve manter a mesma orientação.